Hardware
Webcam
5 Stück des Typs Logitech Quickcam Pro 4000 wurden für das Tracking verwendet.
| Sensortyp | ICX098BQ von Sony oder LZ24BP von Sharp |
| Grösse | 1/4″ VGA CCD Progressive Scan |
| Video Auflösung | 640 (H) x 480 (V) |
| Effektive Pixel | 659 (H) x 494 (V) |
| Pixel Pitch | 5.6um (H) x 5.6um (V) |
| Sensorgrösse | 4.6mm (H) x 3.97mm (V) |
| Bildwiederholrate | Maximal 30 Bilder pro Sekunde |
Das USB-Anschlusskabel der Webcam darf mit einem maximal 4.5 Meter langen USB-Kabel verlängert werden.
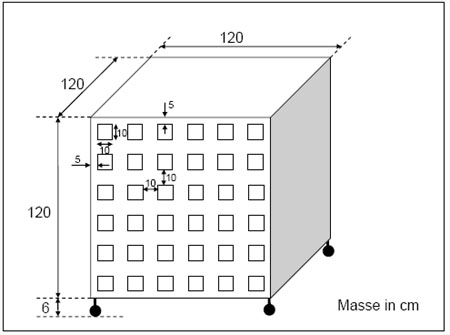
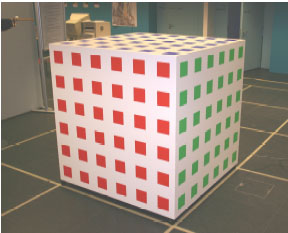
Kalibrierungswürfel
Der Kalibrierungswürfel besteht aus 3mm Pavadex einseitig weiss beschichtet. Die Kanten sind innen verstärkt mit Holzleisten 18mm x 18mm. Das Schachbrettmuster besteht aus farbiger selbstklebender Folie. Der Würfel ist auf 4 Rollen montiert und somit einfach verschiebbar.
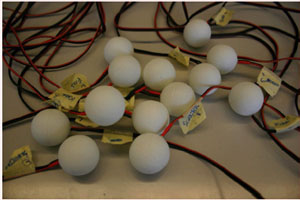
LED Exoskelett
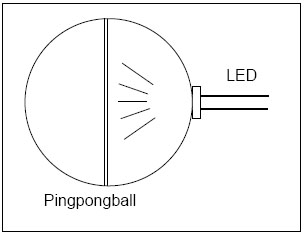
Das Exoskelett besteht aus 13 Leuchtdioden, welche in Pingpongbälle eingelassen sind. Das ganze wird von einer Elektronik gesteuert, welche von 4 Akkus vom Typ Mignon gespiesen wird. Da die LEDs einen relativ schmalen Abstrahlwinkel von 8° respektive 15° haben, wird durch die diffuse Oberfläche der Pingpongbälle eine relativ gleichmässige Ausleuchtung erreicht.
Die Pingpongbälle werden mit Klettverschluss an der Person befestigt.

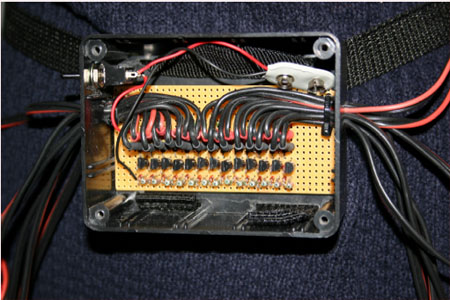
Schema Stromversorgung LED-Exoskelett
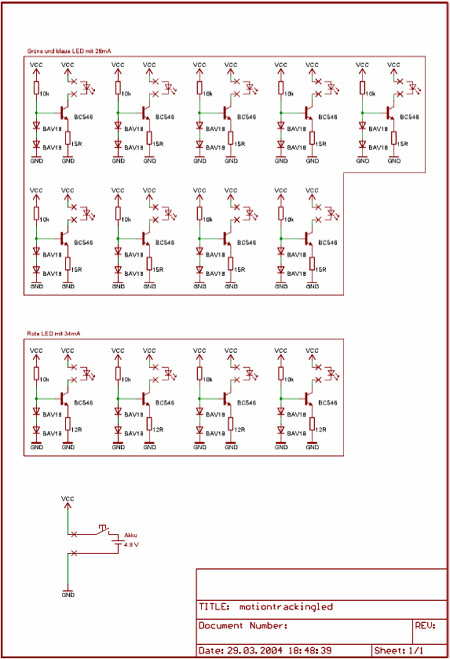
Bestückungsplan Stromversorgung LED Exoskelett
| – | Typ | Wert |
|---|---|---|
| D1 – D26 | Diode | BAV18 |
| Q1 – Q13 | Transistor | BC546 |
| R1 – R13 | Widerstand | 10kR |
| R14 – R17 | Widerstand | 12R |
| R18 – R26 | Widerstand | 15R |