Der Blindenstock lernt sehen!
Wie ein einfacher Blindenstock mit passender Sensorik zu einer intelligenten, elektronischen Orientierungshilfe wird.
Von Jenny Meier
 |
Jenny Meier tauchte durch ihre Lehre als Elektronikerin EFZ bei libs Industrielle Berufslehren Schweiz und ABB in die Welt der Elektronik ein. Nach der Lehre trat sie direkt das berufsbegleitende Elektro- und Informationstechnik Studium an der FHNW an. Neben dem Studium arbeitet sie bei Iftest AG im Prototyping. Für sie ist ganz klar, dass das Geschlecht keine Rolle spielt und es mehr Frauen in der Elektronik und allgemein in technischen Berufen braucht. |
Ist es nicht merkwürdig, dass sich blinde Personen noch immer mit einem einfachen Stock durch die Strassen manövrieren, obwohl selbst ein Smartphone dutzende Sensoren besitzt? Der Blindenstock ist zwar sehr einfach konstruiert, dennoch ist er für blinde Personen ein essenzielles Hilfsmittel im Alltag, um den Boden vor sich zu ertasten und so den Weg zu finden. Ein intelligenter, elektronischer Blindenstock kann jedoch diesen Detektionsbereich erweitern und schützt den Anwender zugleich vor höherliegenden Objekten, an denen sich die Person stossen könnte.
Die Sicherheitslücken des Blindenstocks
In einem Zeitalter, in welchem es unzählige intelligente elektronische Geräte gibt, irritiert es, dass eine Grosszahl von blinden Personen im Alltag noch immer auf herkömmliche Blindenstöcke angewiesen ist. Diese dienen primär zum Ertasten des Bodens. Doch die grösste Schwäche des Blindenstocks besteht konkret darin, dass der Bauch- bis Kopfbereich des Anwenders ausserhalb des Detektionsbereiches liegt. Dies, obwohl sich gerade auf dieser Höhe sehr viele Gefahren befinden. Es gibt bereits elektronische Orientierungshilfen, die jedoch nicht zuverlässig und zu teuer sind. Der Anwender kann sich auf diese Geräte nicht verlassen, weil sie einerseits nur bestimmte Materialien und somit nicht alle Hindernisse erkennen können. Und weil sie andererseits wohl vor umliegenden Objekten warnen, die sich aber ausserhalb des relevanten Gehbereiches befinden. Diese Mängel führen zu einer Verunsicherung bei den Anwendern und erschweren somit die Orientierung, anstatt diese zu erleichtern. Deshalb ist in Zusammenarbeit mit dem Schweizerischen Blinden- und Sehbehindertenverband SBV ein intelligenter, elektronischer Blindenstock entwickelt worden. Was heisst aber intelligent – bei einem Stock?
Erweiterter Detektionsbereich
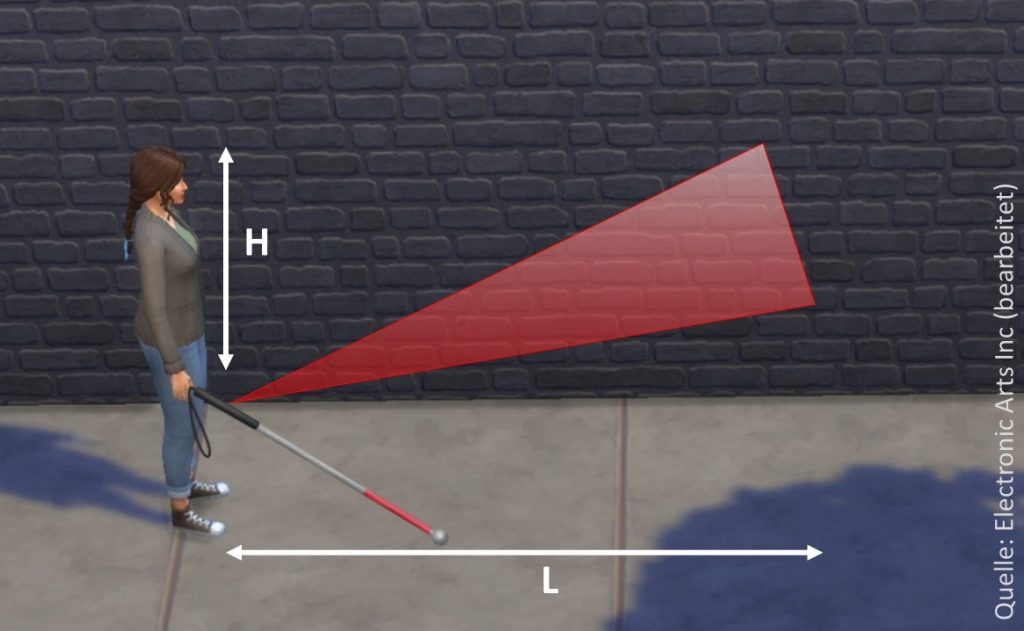
Intelligent heisst, dass der Stock mit elektronischen Komponenten (siehe Abb. 1) ausgestattet wird, um einerseits den Detektionsbereich in die Höhe zu erweitern, andererseits um zu differenzieren, ob ein erfasstes Objekt innerhalb des Gehbereiches liegt oder nicht. Die Abb. 2 zeigt den erweiterten Detektionsbereich. Da die elektronischen Komponenten den Blindenstock nicht ersetzen, sondern ergänzen sollen, beschränkt sich der erweiterte Erkennungsbereich auf die Höhe (H) (Abb. 2) von Bauch bis Kopf. Die Messdistanz (L) wird ausgedehnt und lässt sich über eine Taste am Blindenstock über drei Stufen einstellen. Die rote Fläche stellt den Abstrahlwinkel des Abstandssensors dar.
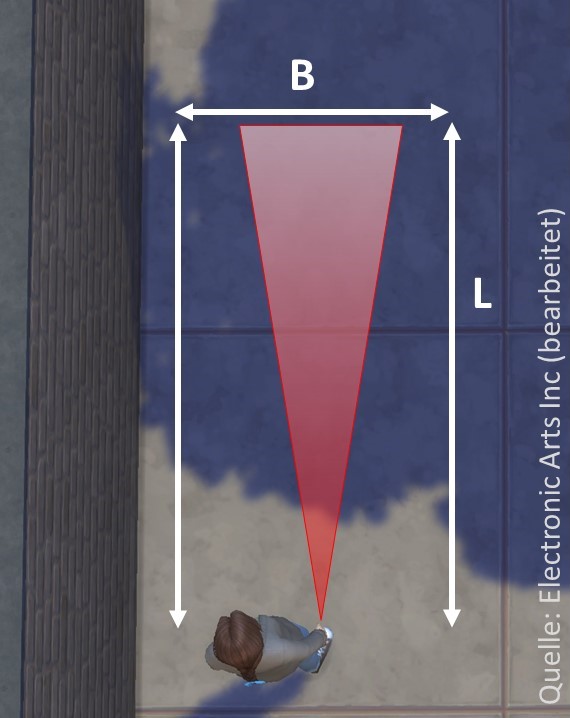
Für blinde Personen sind grundsätzlich nur Gegenstände ein Hindernis, welche sich in ihrem, d.h. unmittelbar vor ihnen liegenden, Gehbereich befinden. So stellt eine Mauer, an der die Person entlang geht, kein Hindernis dar, ein Strassenpoller vor ihnen jedoch schon. Die Abb. 3 zeigt den relevanten Gehbereich. In dieser Zone sollen die Objekte detektiert werden. Dabei gilt zu beachten, dass nicht vor Hindernissen ausserhalb der Breite (B) (Abb. 3) gewarnt werden soll – selbst wenn der Blindenstock ausgeschwenkt wird. Dadurch wird verhindert, dass nicht vor zum Beispiel parkende Autos oder Mauern, an denen die blinde Person lediglich entlang geht – und somit kein Hindernis darstellen – detektiert werden. Die Länge (L) entspricht derselben Länge wie in Abb. 2.
Für die in Abb. 2 und 3 ersichtlichen Masse gelten die folgenden definierten Werte:
- Höhe (H) = 100 cm
- Breite (B) = 100 cm
- Länge (L) = einstellbar über 3 Stufen: 150 cm, 200 cm, 300 cm
Aufbau des Working Model
Das Working Model ist ein vereinfachter Aufbau, welcher es ermöglicht das Funktionsprinzip zu erforschen. Mithilfe der daraus resultierenden Erkenntnisse kann zu einem späteren Stadium des Projektes ein erster Prototyp hergestellt werden. Das Working Model muss nur unter Laborbedingungen funktionieren. Dies bedeutet, dass Eigenschaften wie die Akkulaufzeit und Wetterfestigkeit, vernachlässigt werden.
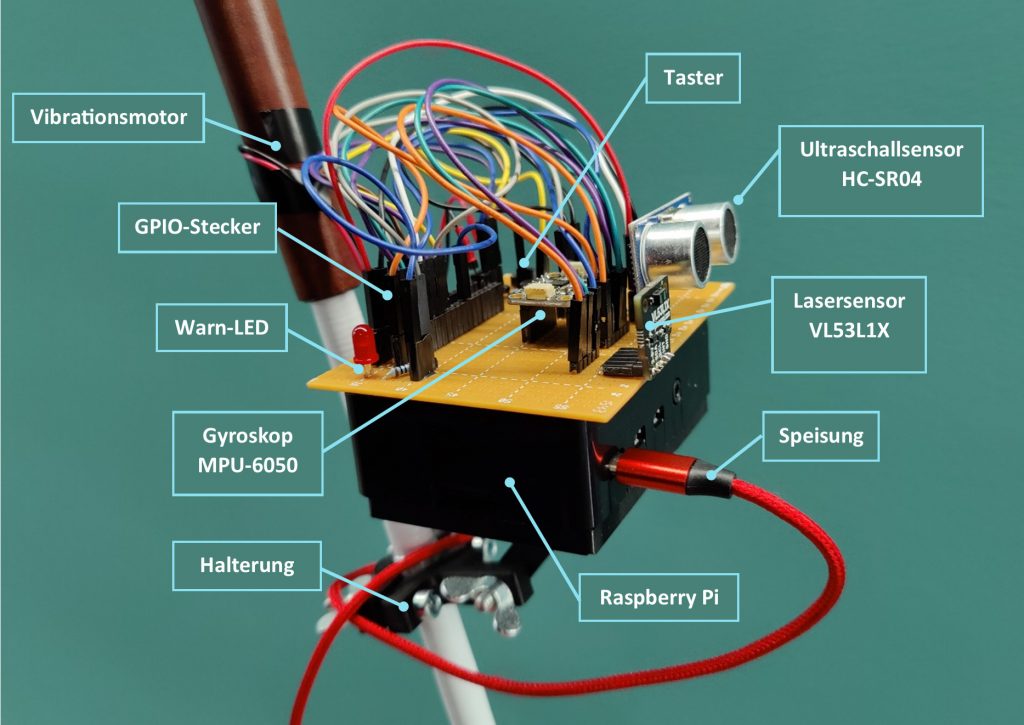
Ein Raspberry Pi (Datenblatt hier) steuert das entwickelte Working Model. Dieser kleine Computer führt die Software, geschrieben in Python, aus. Gespiesen wird der Raspberry Pi aktuell mit einer handelsüblichen Powerbank. Die Sensoren werden über den General-Purpose Input/Output-Stecker, kurz GPIO-Stecker, mit dem Raspberry Pi verbunden. Die Abb. 4 zeigt den Aufbau des Working Models. Wie zu erkennen ist, besitzt dieses einen Ultraschallsensor und einen Lasersensor. Dies, weil jede Sensortechnologie für sich Stärken und Schwächen besitzt: Vorteil der Detektion mit Ultraschall ist, dass auch Glas gut detektiert werden kann, jedoch sind weiche und abgewinkelte Materialien problematisch. Beim Laser ist es genau umgekehrt. Er kann Gegenstände aus Glas oftmals nicht erkennen, dafür weiche und abgewinkelte Objekte. Verwendet wird zum einen der Ultraschallsensor HC-SR04 (Datenblatt hier), der Ultraschallwellen aussendet, die, wenn sie von einem Objekt reflektiert werden, zurück zum Sensor gelangen. Auf der Basis der verstrichenen Zeit zwischen Senden und Empfangen der Ultraschallwellen, berechnet die Software die Distanz zum Objekt. Dieses Verfahren wird Time of Flight (auf Deutsch Laufzeitmessung) genannt. Und zum anderen ist der Lasersensor VL53L1X (Datenblatt hier) verbaut, wobei hier dasselbe Verfahren genutzt wird – nur mit Laser im nicht sichtbaren Wellenlängenbereich.
Die Warnung vor dem Hindernis erfolgt schliesslich über einen Vibrationsmotor am Stockgriff. Das Working Model gibt die Warnung zusätzlich über eine LED aus. Diese wird jedoch lediglich für die Funktionstests benötigt und hat keinen Nutzen für den blinden Endbenutzer. Weiter muss der Blindenstock auch erkennen, wie weit er ausgeschwenkt wird. Das eingebaute Gyroskop MPU-6050 misst hierfür u.a. die Winkelgeschwindigkeit, also wie schnell der Sensor gedreht wird. Mit diesem Messwert lässt sich der Winkel berechnen, um wie viel der Stock nach rechts oder links ausgeschwenkt wird. Dadurch wird verhindert, dass Objekte ausserhalb der Gehbereichsbreite (B) (Abb. 3) erfasst werden.
Der Stock, der sieht und warnt
Das entwickelte Working Model ist tatsächlich in der Lage, Objekte im Bereich von Bauch bis Kopf zu erkennen. Die Warnungen über den Vibrationsmotor werden ausschliesslich bei Hindernissen innerhalb des Gehbereiches ausgelöst. Dadurch ist es möglich, dass der Nutzer an einer Mauer entlang geht, ohne davor gewarnt zu werden. Da die Warnung per Vibration erfolgt, wird das Gehör – eines der wichtigsten Sinnesorgane für blinde Personen – nicht beansprucht. Die Messdistanz kann über drei Stufen eingestellt werden, wodurch der intelligente, elektronische Blindenstock in verschiedenen Alltagssituationen, egal ob beim Einkaufen – also im Nahbereich – oder auf einem Gehweg – also im Fernbereich – eingesetzt werden kann.
Einzig kleine, abgewinkelte Objekte wie z.B. dünne Metallrohre, erkennt das Working Model nicht zuverlässig. Grund dafür sind die beiden Abstandssensoren. Vor allem der Lasersensor VL53L1X wird durch Umgebungslicht stark beeinflusst, wodurch Fehldetektionen verursacht werden. Die Wahl der Abstandsensoren muss somit weiter untersucht und optimiert werden. Grundsätzlich zeigt die Funktion des Working Model jedoch, dass es durchaus Möglichkeiten gibt, den herkömmlichen Blindenstock zu erweitern und dabei die Mängel der bereits existierenden elektronischen Orientierungshilfen zu beseitigen. Mit den gewonnenen Erkenntnissen steht einem ersten Prototyp nichts mehr im Weg.
Betreuer
- Tony Keller
- Prof. Dr. Stefan Gorenflo