WECANT – Sensor Network
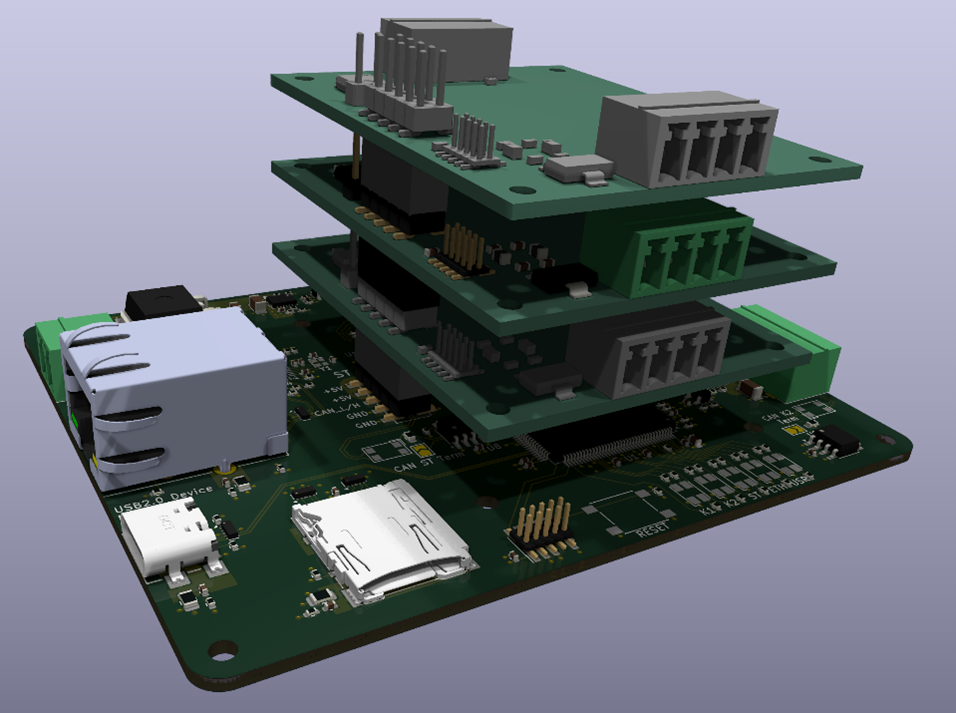
To make sure the rover is moving into a direction less dependent on third-party boards, we are developing a new sensor network called WECANT. The name is an abbreviation of the technologies used: Wired Ethernet CAN Adaptive Network Topology. Its purpose is to connect different sensors and actuators into the existing ROS (Robot Operating System). After successful implementation, we can control and monitor an almost unlimited amount of boards through our ROS-platform, as long as they are built according to our standard. Therefore, we defined hardware and software templates for fast and easy development of new sensor and actuator boards. In the following image, the concept of this standard is visible. New boards can be stacked on top of each other, enabling quick connection and space-efficient storage, perfect for tight applications like our rover.
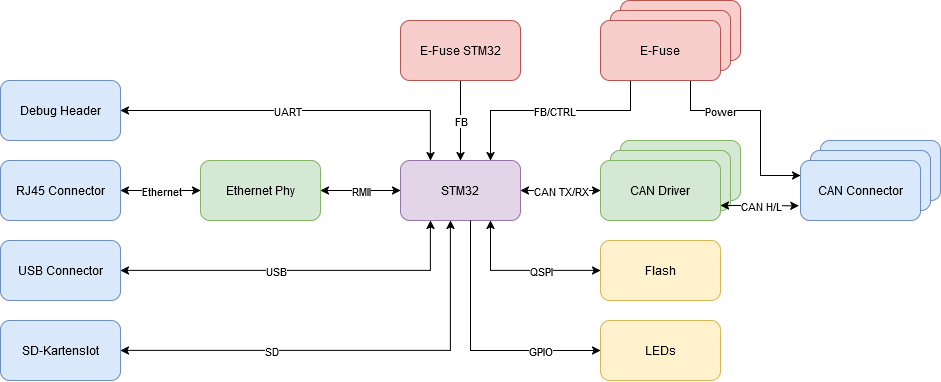
The connection between the server and the sensors/actuators is established through a board called ICANT (Interface Controller for Adaptive Network Topology). It connects to the server running the ROS implementation via TCP over Ethernet. The CAN protocol is used to communicate with the other boards, as it is very safe and robust. This ensures that our valuable information is not lost on the way to its destination. The block diagram of the ICANT can be seen in the following graphic. Apart from different debug interfaces like UART, USB, SD-Card and LEDs, the STM32H7 processor can monitor various currents and voltages on the PCB. The ICANT has three different CAN-interfaces, two connected to cable connectors, while one is for the stacking connection mentioned above.
So far, we have built and tested our ICANT board with different WECANT boards. While software development is still in progress, we were able to establish a connection between the server and different sensor and actuator boards, exceeding the desired 100Hz refresh rate with handling two 1kHz streams easily. We have already built different sensor and actuator boards, for example the beacon (visible in the image below), as well as boards for relay control, voltage measurement, load cell (for weight measurement), and a science board. Additionally, we implemented our system into the control of the drill unit and the new battery-management-system. Stay tuned for more blog posts regarding these boards!

Comments
No comment posted about WECANT – Sensor Network