
Präzisionslandwirtschaft
Gemeinsam mit der TELLnet AG erarbeitete die FHNW eine energieoptimierte Pfadplanung für Flächenflieger in hügeligem Gelände.
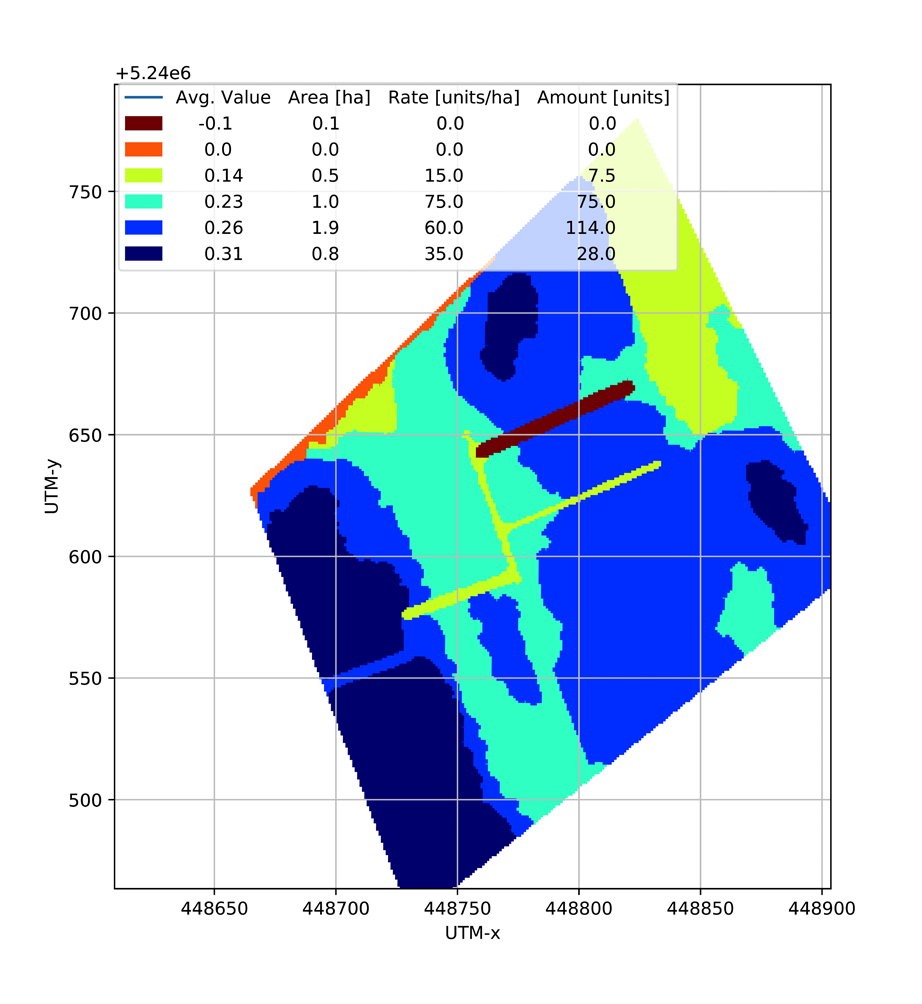
Abb. 1: Düngerplan eines ausgewerteten Feldes
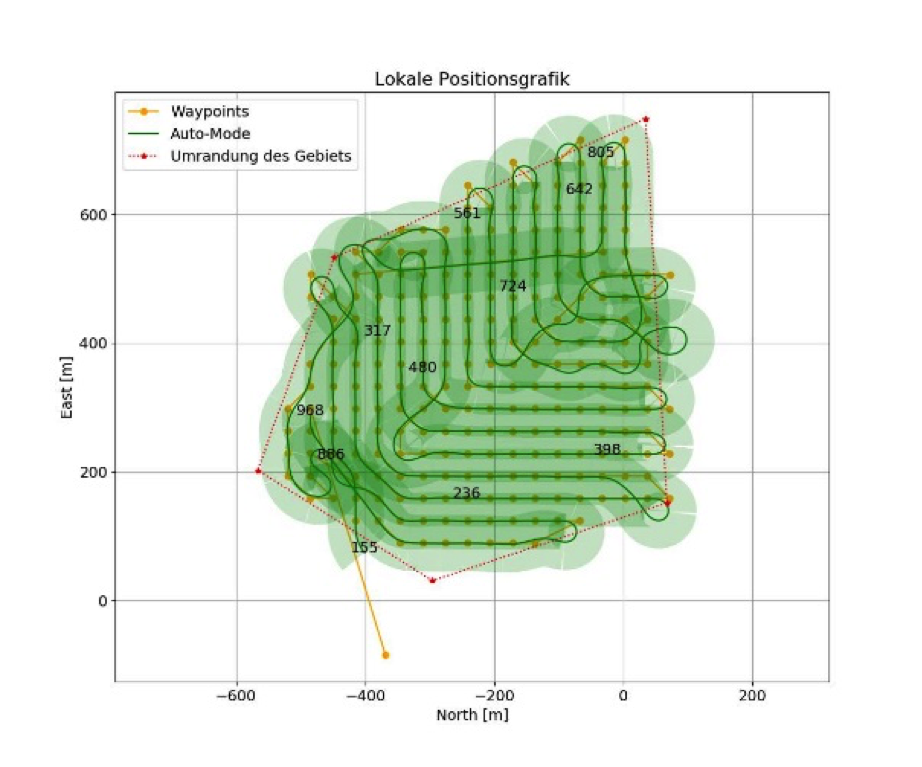
Abb. 2: Simulationsergebnis eines abgeflogenen Pfades: Feld mit Hügelkante
Moderne Regelungstechnik, Optimierung
Für den Einsatz von Flächenflieger in Hanglagen soll eine Methode entwickelt und implementiert werden, mit welcher ein energieoptimaler Flugpfad generiert werden kann. Dieser muss es ermöglichen, Felder auf konstanter Höhe über Grund effizient autonom abzufliegen. Dabei müssen die Limitierungen eines Flächenfliegers, Windverhältnisse und die Topologie des abzufliegenden Feldes berücksichtigt werden. Start und Landung sollen automatisiert durchgeführt werden können und so den Betrieb auch für Nicht-Modellflugpiloten zu ermöglichen.
Beim Ansatz des «Precision Farming» wird ein Feld abgeflogen und die Luftaufnahmen einer Hyperspektralkamera aufgezeichnet. Anhand der Bilder können das Wachstumsstadium und der Pflanzenzustand über das ganze Feld ausgewertet werden. Mit diesen Informationen kann ein Düngerplan generiert werden (Abb. 1), der lokal mehr oder weniger Düngermenge vorsieht. Durch diesen Ansatz können Dünger und Kosten gespart werden und nebenbei wird die Umwelt weniger belastet.
Es wird ein Elektrosegler mit einer Hybridkamera bereitgestellt, der ein Feld gemäss einem Flugplan abfliegen kann. Den Generierungsprozess für diesen Plan hat die FHNW mit der Firma TELLnet AG entwickelt. Er ist für den Flugcontroller des Elektrosegler mit der Software PX4 ausgelegt. Er berücksichtigt die Limitierung des Elektroseglers, erkennt und umfliegt Hindernisse, übernimmt selbständig den Start und die Landung und ermöglicht den Betrieb für Nicht-Modellflugpiloten.
Nachdem der Benutzer ein abzufliegendes Feld definiert hat, wird mit der im Institut für Automation entwickelten Software ein Wegpunktemuster erzeugt und zur Erhöhung der Flexibilität der Flugplanung freiwillige Punkte ausserhalb des Feldes hinzugefügt. Anhand einer ausgeklügelten Energiemetrik und einem an A* angelehnten Optimierungsalgorithmus sucht die SW einen energieoptimalen Flugpfad. Das Ergebnis ist eine Liste der abzufliegenden Wegpunkte, die in den Flugcontroller des Elektroseglers übertragen werden.
Um nicht jeden geplanten Pfad in der Realität austesten zu müssen, wurde zusätzlich ein bestehendes Flugzeugmodell in Gazebo - einer Software zur Robotersimulation - auf die Gegebenheiten des Elektrosegler adaptiert. Damit können nun optimierte Flugwege direkt auf dem Rechner simuliert und so erste Analysen bezüglich Überlappung und Energie durchgeführt werden (Abb. 2).
Zur Kollisionsvermeidung wird zurzeit getestet, wie mittels FLARM und einer geeigneten Ausweichstrategie das Risiko von Kollisionen mit anderen Drohnen vermindert werden kann.
Auftraggeber | |
Ausführung | |
Dauer | >3 Jahre |
Projektteam | Prof. Dr. Jürg P. Keller (Leitung), Stefan Umbricht und Tobias Zubler, Wissenschaftliche Forschungsassistenten |