Hoch hinaus mit thermischer Energie
Bekanntlich nutzen Segelflugzeuge thermische Aufwinde, um sich in der Luft zu halten. Wie lange gesegelt werden kann, hängt davon ab, wie gut der Pilot sie erkennt. Ein neuer Ansatz will das ändern. Ausgestattet mit modernster Sensorik und einer auf maschinellem Lernen basierenden Steuerung soll das Segelflugzeug autonom länger und weiter fliegen.
von Fabian Glutz
 Fabian Glutz Fabian Glutz | Fabian Glutz hat sein Studium der Elektro- und Informationstechnik im Herbst 2020 begonnen und im Sommer 2023 erfolgreich abgeschlossen. Vor dem Bachelorstudium besuchte er die ABB Technikerschule. Aktuell arbeitet er an seiner Masterarbeit am Institut für Sensorik und Elektronik. Daneben arbeitet er bei der Firma Huba Control AG, wo er verschiedenste Sensorsysteme mitentwickelt. |
Für Aufklärungsdrohnen ist es wichtig, möglichst lange autonom fliegen zu können. Aber auch Drohnen zur Tierbeobachtung sollen möglichst leise über einem Gebiet kreisen, damit die Tiere nicht aufgeschreckt werden und flüchten. Die Frage ist also: Wie lassen sich Aufwinde erkennen? Einen neuen Ansatz verfolgt dieses Projekt im Studiengang Elektro- und Informationstechnik. Autonome Flugzeuge sollen allein durch thermische Aufwinde in der Luft gehalten werden. Dazu soll ein System entwickelt werden, das Aufwindzonen detektiert und die Steuerung für eine optimale, lang dauernde Flugroute berechnet.

Echtes Modell, echte Daten und keine Simulation
Als Versuchsobjekt dient ein modernes Modellsegelflugzeug der 4- bis 5-Meter-Klasse. Damit dieses Modell möglichst lange autonom (ohne Handsteuerung) in grosser Höhe fliegt, ist es mit hochpräziser Sensorik wie GPS, Barometer und Airspeed-Sensor ausgestattet. Ein Updraft Estimator soll die Wahrscheinlichkeit von Aufwindbereichen berechnen. Diese Daten werden dann an ein zentrales Steuersystem übermittelt. Dieses verarbeitet zusätzliche Bildinformationen mit Hilfe von maschinellem Lernen, um die Aufwindwahrscheinlichkeiten zu verifizieren und daraus die optimale Flugroute zu ermitteln.

Die Herausforderung besteht darin, dass Thermik nicht direkt sichtbar ist, sondern nur durch indirekte Hinweise prognostiziert werden kann. So nutzen Pilot:innen ihre Erfahrung über Merkmale wie kreisende Raubvögel, Bodenbeschaffenheit, Vegetation und Wolkenformationen, um Aufwinde auszumachen. Aber kann man solches Erfahrungswissen einer Maschine beibringen? Es gibt Versuche dazu:
- In den 2000er Jahren experimentierte z. B. die NASA in dieser Richtung – allerdings mit wenig Erfolg (siehe hier). Mit der dort verwendeten einfachen Steuerung hielten sich die Flugzeuge in Versuchen zwar bis zu vier Stunden in der Luft, ein aktives Anfliegen von Aufwinden war aber nicht möglich.
- Einen ähnlichen Ansatz wie im vorliegenden Projekt verfolgt man am Institut für Flugmechanik und Flugregelung (IFR) der Universität Stuttgart. Das dortige Forscherteam arbeitet ebenfalls mit ML (siehe Link unten). Der Unterschied besteht jedoch darin, dass ihre Steuerung allein auf Wahrscheinlichkeiten beruht. Das heisst, es wird über Simulationen ermittelt, wo Thermik sein könnte. Das Auffinden ist also rein zufällig. Erstaunlicherweise funktioniert ihr Ansatz gut, Flugzeiten bis zu acht Stunden sind möglich. Aber auch in ihrem Projekt konnte noch keine Strecke von A bis Z kontrolliert geflogen werden.
Das vorliegende Projekt basiert dagegen auf aktuellen und konkret erhobenen Daten, die mit Erfahrungswerten abgeglichen werden. Im Mittelpunkt steht die Bildverarbeitung, die die klassische Auswertung von Sensordaten entscheidend verbessert. Dadurch soll das Flugzeug in der Lage sein, Aufwinde schneller und präziser aufzuspüren und in die Höhe zu steigen. Dies führt zu einer weiteren massiven Erhöhung der Flugdauer.
Wahl der Sensoren und Messwertverarbeitung
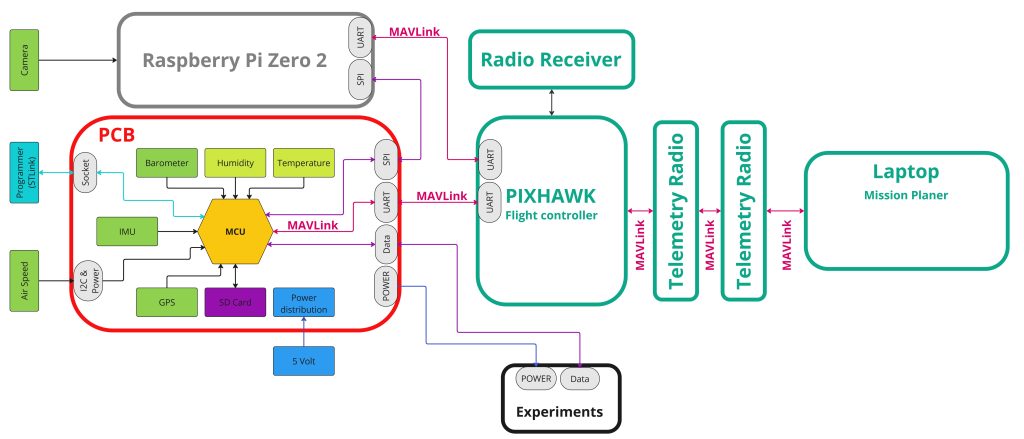
Zur Erkennung von Thermikzonen müssen – wie bereits erwähnt – zunächst einige Sensoren installiert und deren Messwertsignale ausgelesen und ausgewertet werden. Dazu wurde als Erstes eine Platine entwickelt, die mit folgenden Sensoren bestückt ist:
- Inertiale Messeinheit (IMU)
- GPS
- Barometer
- Temperatursensor
- Luftfeuchtigkeitssensor
Die Platine ist essentiell, um die erforderlichen Umweltdaten wie Flughöhe, Geschwindigkeit, Position oder Ausrichtung zu erfassen. Die ermittelten Werte müssen aufbereitet und über einen Datenspeicher an einen Rasberry Pi weitergeleitet werden. Die Anbindung an den Flugregler erfolgt über eine UART-Schnittstelle. Der Logikregler benötigt die Informationen, um die Aufwinde präzise zu lokalisieren. Die Entwicklung der Platine war Aufgabe im Projekt 3 des Studiengangs Elektro- und Informationstechnik im Herbstsemester 2023.
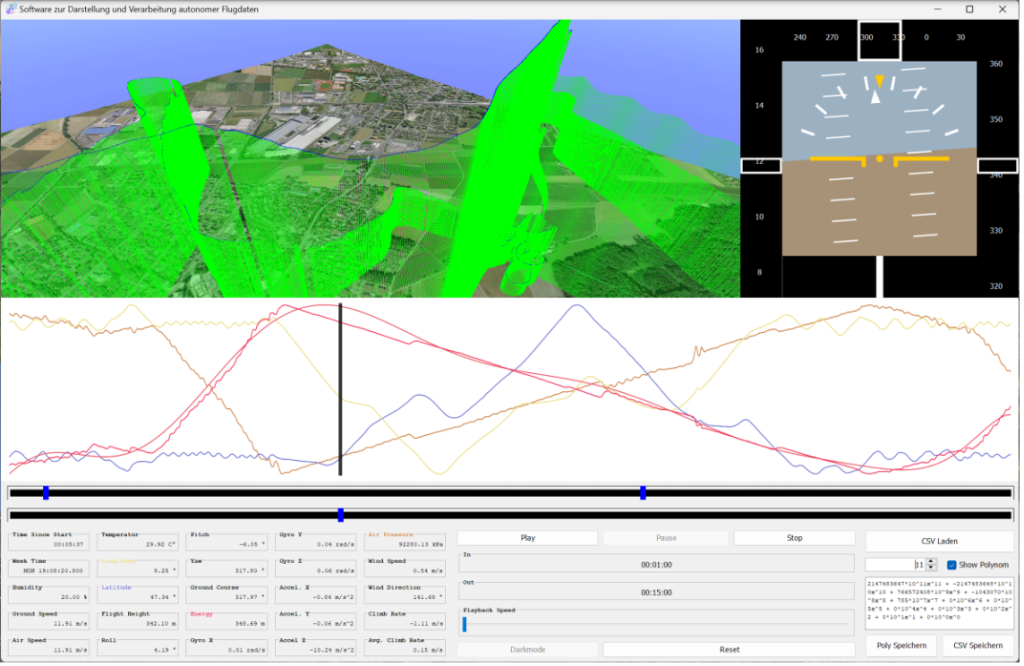
Ein weiteres Kernelement ist die Software zur Auswertung der Flugdaten. Diesen Aufgaben haben sich die Studierende der Elektro- und Informationstechnik während ihres Projekts 2 im Frühjahrssemester 2024 gewidmet. Dazu haben sie eine Java-Applikation geschrieben, die die gesammelten Daten graphisch darstellt. Diese sind
- Geschwindigkeit,
- Winkelgeschwindigkeit und -beschleunigung,
- Magnetometerdaten,
- Position und (Lage und Höhe) sowie
- Temperatur.
Aus diesen Daten abgleitet soll die App einen 3D-Flugpfad zeigen.
Im Anschluss testeten Studierende des Projekts 2 Elektro- und Informationstechnik das Modellflugzeug in der Praxis. Die Ergebnisse waren sehr vielversprechend, und die gewonnenen Daten (Flugperformance, Steuerung) sind für die Weiterentwicklung äusserst wertvoll.
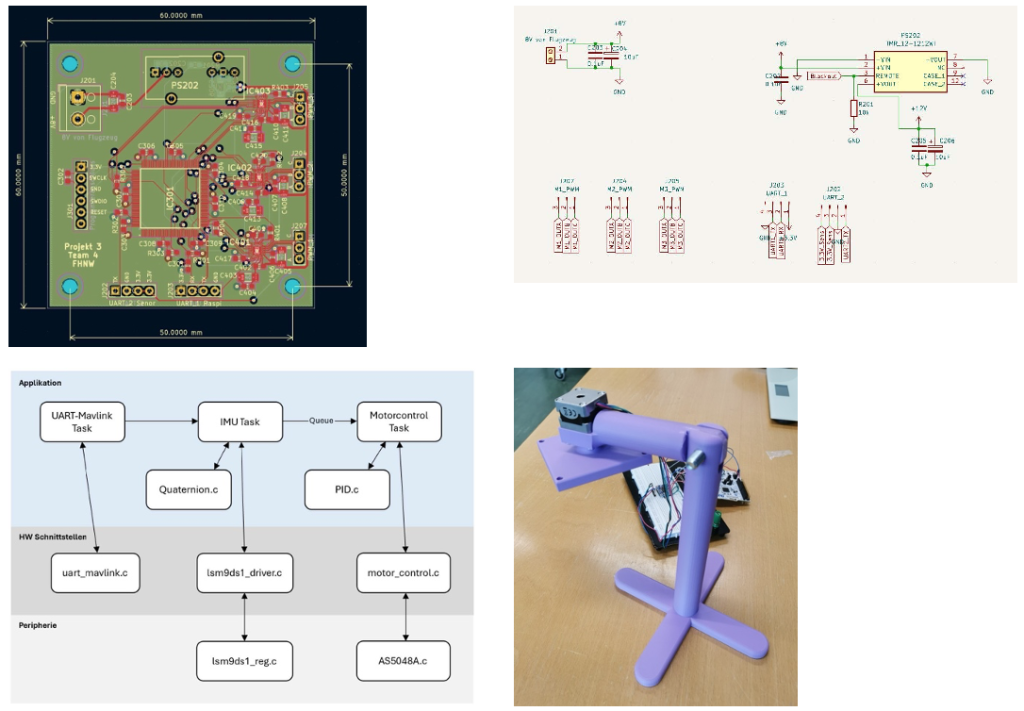
Konstruktion des Kamera-Gimbals
Im dritten Teilprojekt entwickelten nochmals Studierende im Projekt 3 des Studiengangs Elektro- und Informationstechnik ein stabiles Kamera-Gimbal (Herbstsemester 2024). Die Aufgabe bestand darin, die Kamera so auszurichten, dass sie während des Fluges auf eine vorgegebene GPS-Koordinate fokussiert bleibt. Dazu entwickeln die Studierenden
- einen mechanischen Aufbau mit drei Brushless-Motoren (jeweils für eine Achse),
- ein PCB zur Steuerung der Motoren und zum Auslesen einer IMU sowie
- eine Mikrocontroller-Einheit, die Korrekturen berechnet und Steuerbefehle des Logikreglers umsetzt.
Lokalisierung von Aufwinden in Echtzeit
Thermik in Form von Aufwinden entsteht, wenn die Sonne die Erdoberfläche und folglich die Luft in Bodennähe erwärmt (siehe hier). Im Laufe des Tages wird diese Luft in grössere Höhen transportiert, während gleichzeitig kühlere Luft absinkt. Traditionell wird Thermik mit einem Variometer gemessen, das Auf- und Abwinde anzeigt. Das Innovative am vorliegenden Projekt ist jedoch, dass die thermische Bewegung in der Luft optisch eruiert wird. Dieser Teil wird im Rahmen meiner Masterarbeit am Institut für Sensorik und Elektronik (ISE) bearbeitet. Daraus resultieren zwei Schwerpunkte: zum einen die kamerabasierte Lokalisierung von Aufwinden und zum anderen die Entwicklung eines Thermikkreis-Algorithmus für eine optimale Flugperformance (Kreisen in der Säule – Weite bekannt, Wölbklappen richtig einsetzen).
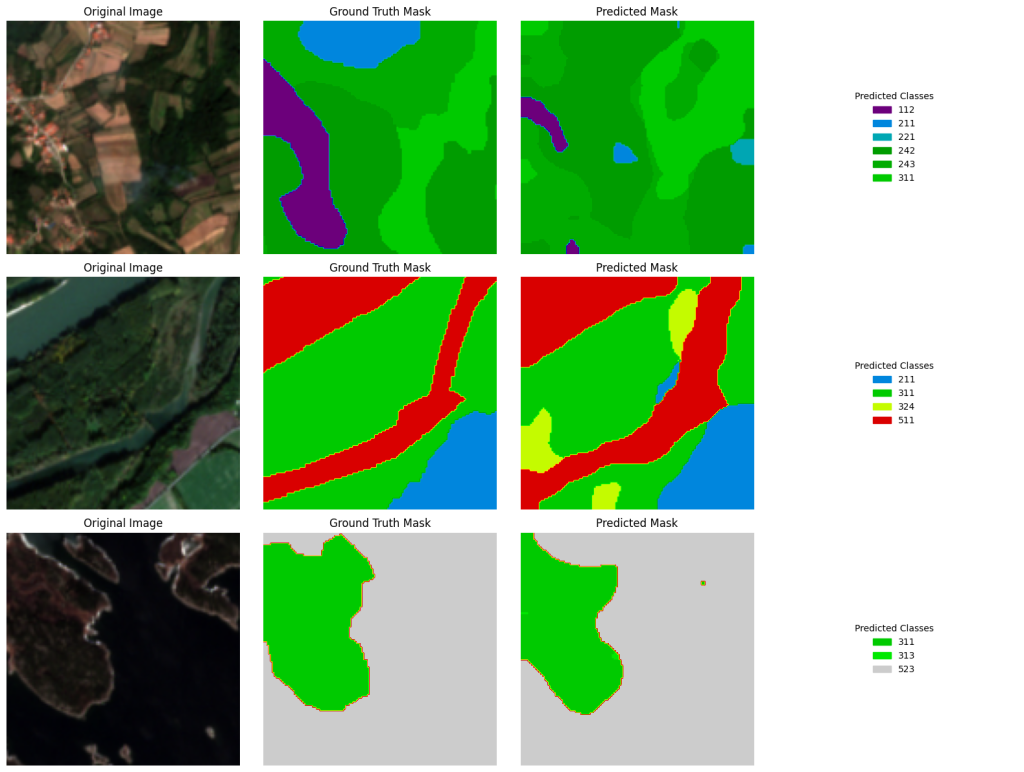
Für den antriebslosen Flug muss das System in der Lage sein, mögliche Aufwindzonen präzise zu identifizieren. Dabei kommen moderne Bildverarbeitungstechniken zum Einsatz, die Muster in der Umgebung wie Wolkenformationen, Schattenverläufe oder Vegetationsmerkmale analysieren (siehe Abb. 9). Diese Informationen sind nötig, um die Wahrscheinlichkeit von Thermik in bestimmten Bereichen zu berechnen und in Echtzeit an das zentrale Steuerungssystem weiterzuleiten. Das Ganze basiert auf einem Algorithmus, der mittels maschinellem Lernen und klassischer Bildverarbeitung mit einer Vielzahl von Flugdaten von BigEarthNet rechnet. Dabei handelt es sich um Satellitenbilder des Bodens, um die Topographie zu studieren, die die Thermik begünstigt.
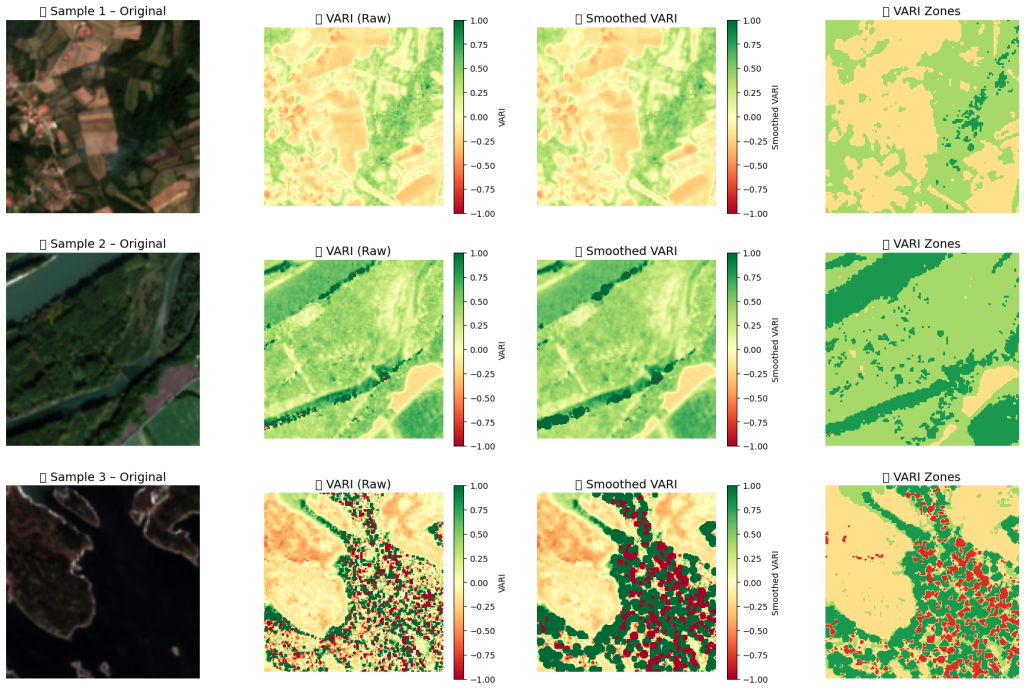
Für das System ist es schwierig, zwischen verschiedenen Vegetationsformen wie Wald, Weide, Ackerland oder Moor zu unterscheiden, noch dazu in Abhängigkeit von der Jahreszeit und dem Tageslicht. Die Vegetationsgrenzen sind besonders wichtig, da hier die meisten Thermikablösungen entstehen, deren Aufwinde für den Aufstieg genutzt werden können. Abbildung 10 zeigt, wie mithilfe des VARI (Visible Atmospherical Resitant Index) potenzielle Aufwinde lokalisiert werden.

Der zweite Schwerpunkt ist die Entwicklung eines Algorithmus, der es dem Flugzeug ermöglicht, effizient in der Thermikzone zu steigen. Der Thermikkreis-Algorithmus analysiert kontinuierlich die Position, Geschwindigkeit und Höhe des Segelflugzeugs in Relation zu den erkannten Aufwindströmungen (siehe Abb. 11). Dabei berücksichtigt er folgende Aspekte:
- Optimale Kreisradien: abhängig von den Windbedingungen und der Intensität der Aufwinde.
- Dynamische Anpassungen: Der Algorithmus passt den Kurs und die Flugbahn kontinuierlich an, um im Bereich der stärksten Aufwinde zu bleiben.
- Energieeffizienz: Ziel ist es, den Energiegewinn zu maximieren und gleichzeitig unnötige Bewegungen zu vermeiden.
Der Algorithmus funktioniert bereits gut. Im Simulator wird eine Genauigkeit von ca. 1 Meter ohne Wind und ca. 2.5 Meter mit Wind erreicht. Er arbeitet derzeit mit Daten (bis das Kamerasystem funktioniert), die von mir getestet wurden. Ausserdem nutzt er die Wölbklappen noch nicht, um die Geschwindigkeit zu halten und den Auftrieb zu maximieren. Aber er liefert bereits genaue und sehr nützliche Daten ans Steuerungssystem.
Infobox: Technische Daten
| Flugzeugmodell: IKURA GPS 4.28m (Aer-O-Tec) Flugregler: Pixhawk 6c Logikregler: Raspberry Pi Zero 2 W Kommunikationssystem: UAV RFD 868x |
Fazit und Ausblick
Beide Teilprojekte ergänzen sich und schaffen die Grundlage für eine autonome und präzise Navigation des Segelflugzeugs, das ausschließlich Aufwinde als natürliche Energiequellen nutzt. Durch die Kombination von moderner Bildverarbeitung, intelligenter Steuerung und maschinellem Lernen wird ein neuer Standard in der autonomen Segelflugtechnik gesetzt.
Darüber hinaus zeigt das Projekt eindrucksvoll, wie modernste Technologie, maschinelles Lernen und praktische Anwendung Hand in Hand gehen können. Und es ist ein Beispiel für die Zusammenarbeit von Studierenden in verschiedenen Projekten und Semestern.
Super spannendes Projekt! Ich habe mich vor ein paar Jahren selbst mal an etwas Ähnlichem versucht – natürlich deutlich einfacher und mit Basic-Werkzeug aus einem Online-Shop.
Es war eher ein Hobbyprojekt, aber ich erinnere mich, wie faszinierend es war, erste Versuche mit Sensorik und Steuerung zu machen.
Deshalb finde ich es umso beeindruckender zu sehen, was mit professioneller Unterstützung, fundierter Ausbildung und Teamarbeit auf diesem Niveau möglich ist. Solche Forschungsprojekte machen richtig Lust darauf, selbst weiter in dem Bereich zu lernen. Wirklich toll!