Creating R2D2, Step 1 (of 500)
Learn how to build your own robotic arm. All you need is some (PB Swiss) Tools, a bit of strap metal and a whole lot of ca$h.
To compete in the European Rover Challenge 2022, our rover needs to be equipped with a robotic arm. With this, the rover can complete multiple tasks such as picking up objects, pressing buttons or plugging in a ethernet cable. Ya know, cause people on Mars also need gigabit ethernet.
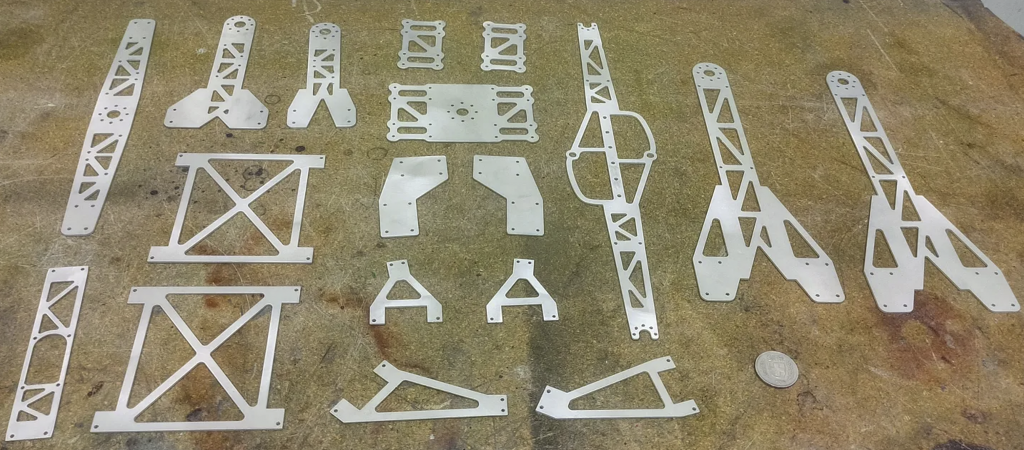
Our arm was designed by our capable mechanical engineering students Nadine and Jan. They were able to design it to enable waterjet cutting and bending as a manufacturing method. Furthermore, the design is exceptionally light. The arm with all it’s motors is only 3 kg.
Below you can see the parts before and after bending.

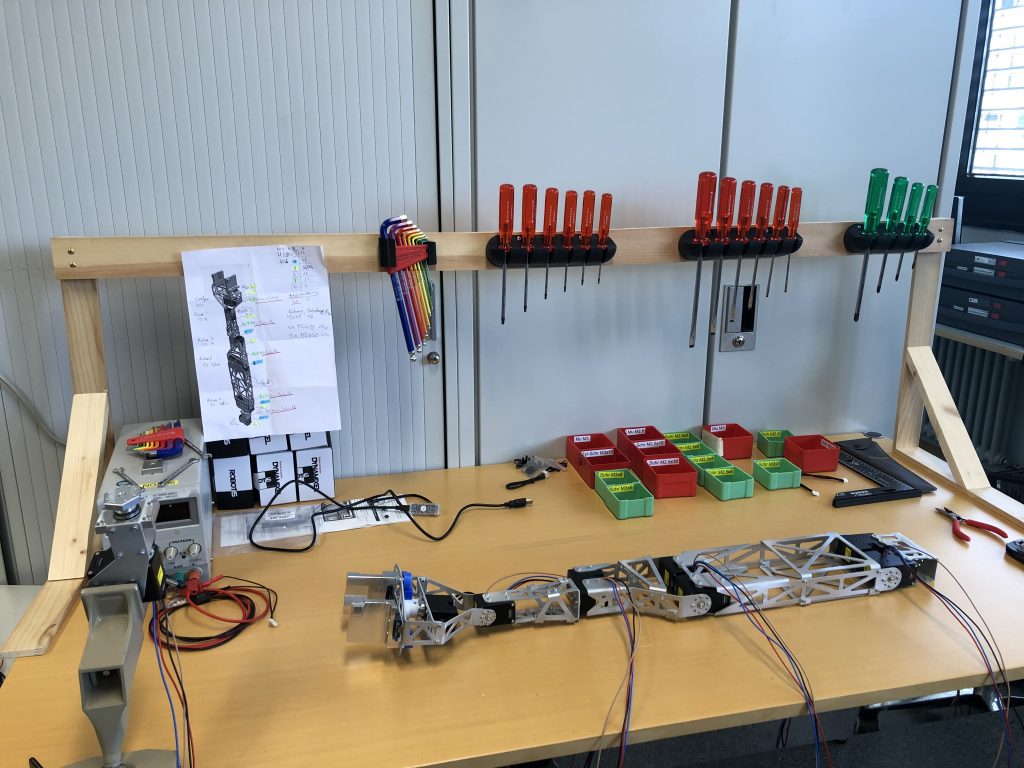
The next step one was to attach the motors and combine everything. Basically like Lego, except you don’t have an instruction manual. Finally, after fitting 132 screws, the arm was finished. Huge shoutout to PB Swiss Tools for providing us with the equipment necessary to do this!
So, what’s next?
Well, the next step is extensive testing of the motors, the mechanical properties and the software. To be able to steer the arm accurately, a digital twin will be simulated in software, so that you can view the exact position of the arm on a pc. But we will tell you about that on another day.
Comments
No comment posted about Creating R2D2, Step 1 (of 500)