Studierende der Hochschule für Technik und Umwelt FHNW überzeugten mit kreativen Lösungen beim Live-Test ihrer selbst entwickelten Rettungsroboter.
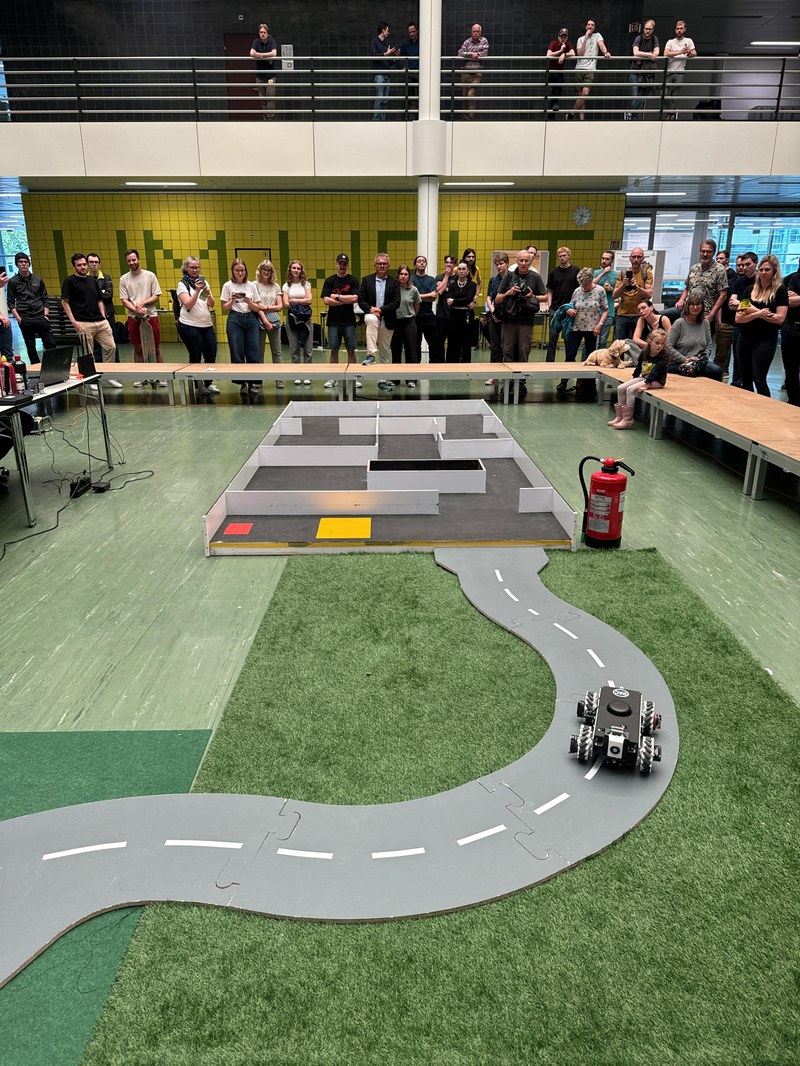
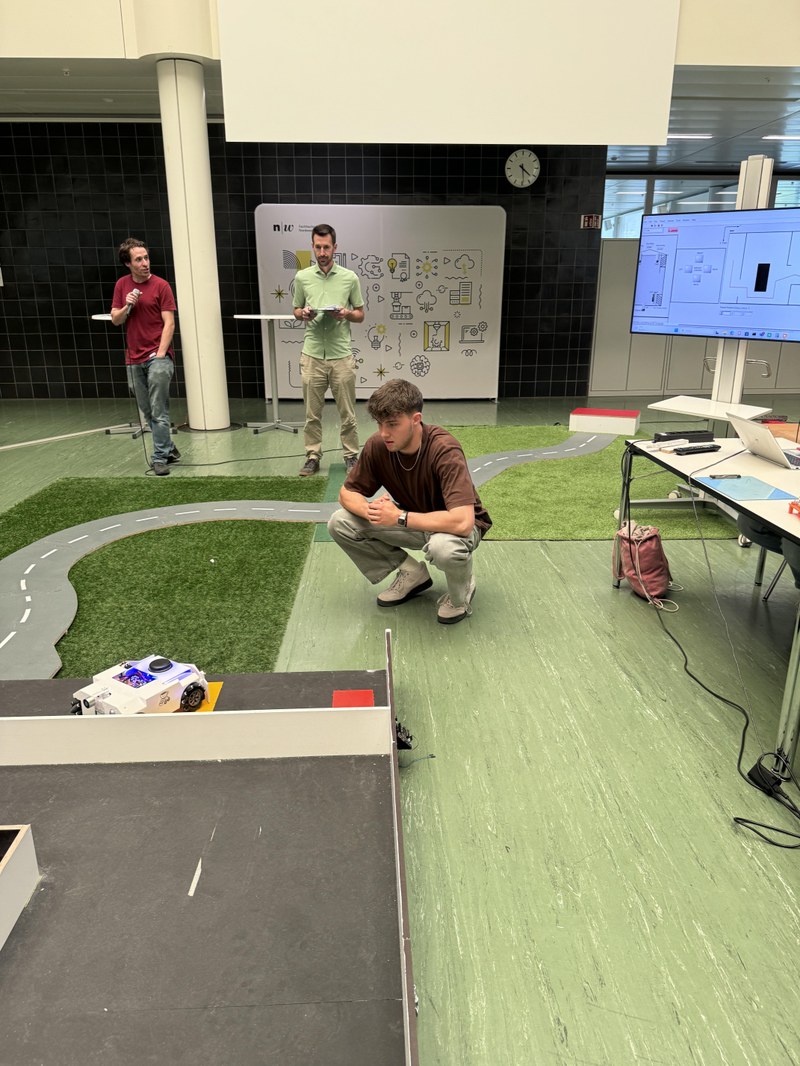
Am 5. Juni 2025 wurde der Lichthof des Hallerbaus an der Hochschule für Technik und Umwelt FHNW zur Einsatzzone für autonome Rettungsroboter. Studierende des Bachelorstudiengangs Systemtechnik präsentierten im Rahmen des Projekts RescueRoBot ihre selbst entwickelten Fahrzeuge – in einer öffentlichen Live-Demonstration vor rund 50 interessierten Zuschauenden.
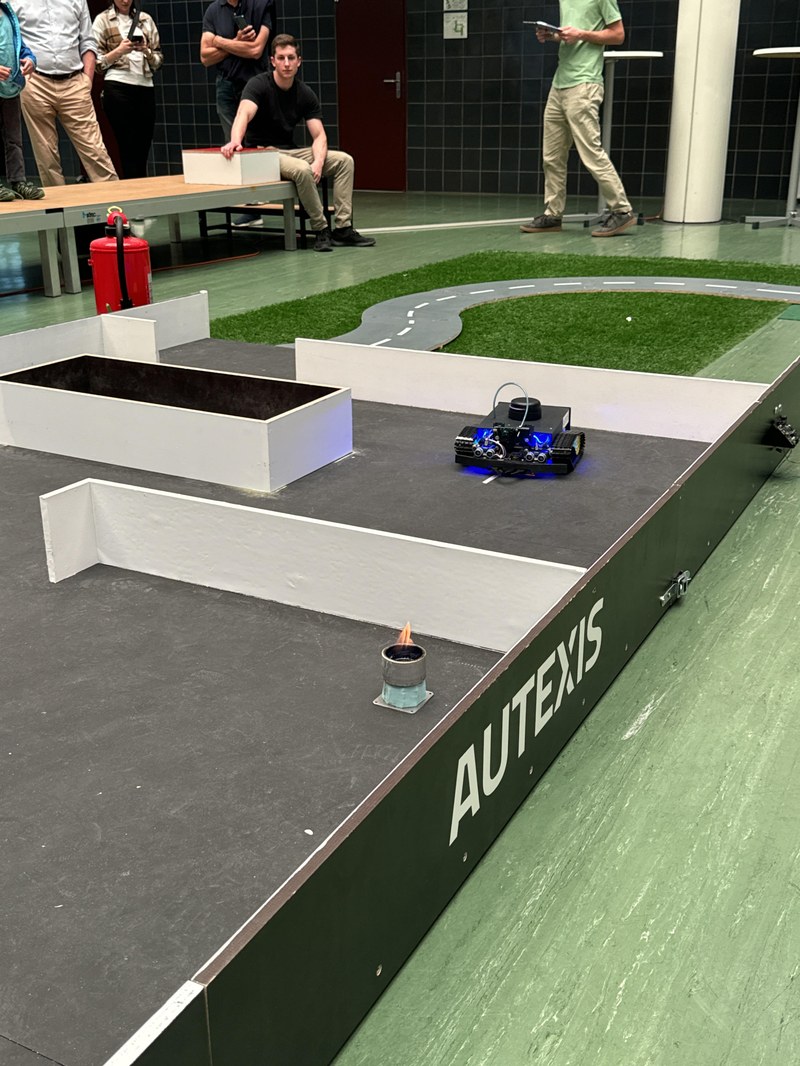
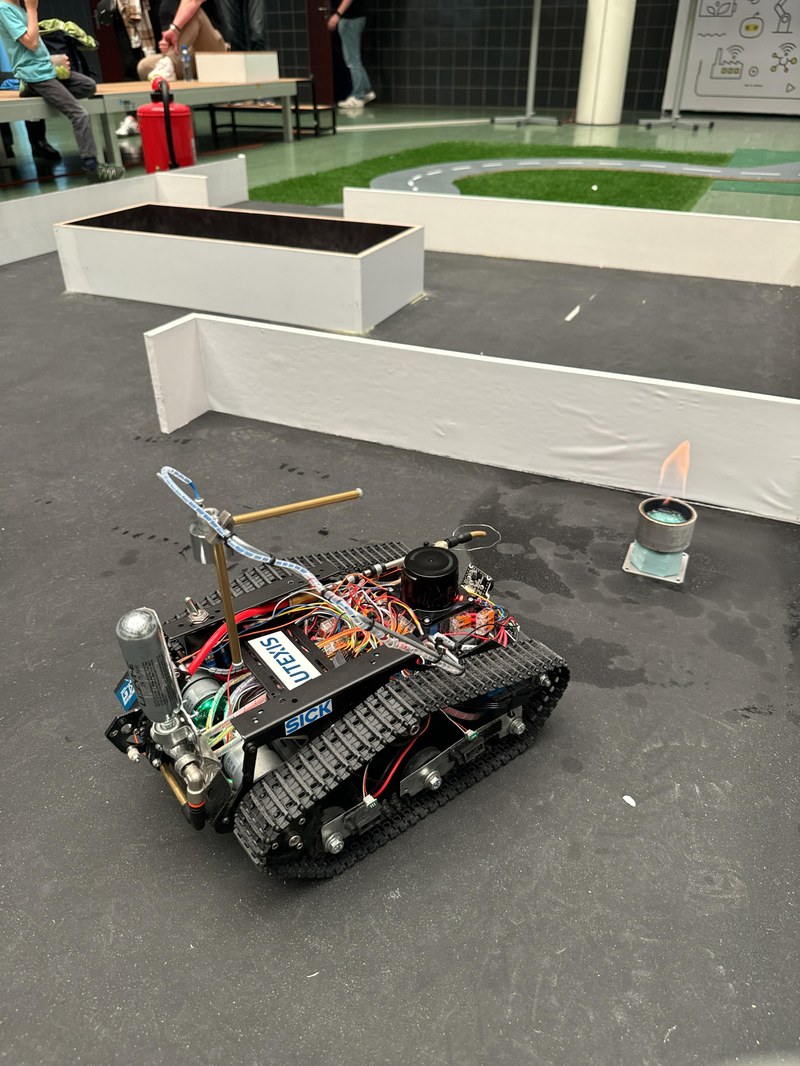
Ein eigens konstruierter Parcours bildete das Herzstück der Veranstaltung: Auf mehreren Stationen wurden reale Einsatzszenarien modellhaft simuliert – darunter ein Gebäudebereich mit eingeschränkter Sicht, Hindernisse auf dem Weg zur Einsatzstelle sowie ein Brandherd und eine Trage mit einer Puppe, die es zu bergen galt. Alle Roboter mussten sich autonom im Gelände orientieren, Entscheidungen treffen und präzise agieren – Fernsteuerung war nicht erlaubt.
Unterschiedliche technische Ansätze – gemeinsames Ziel
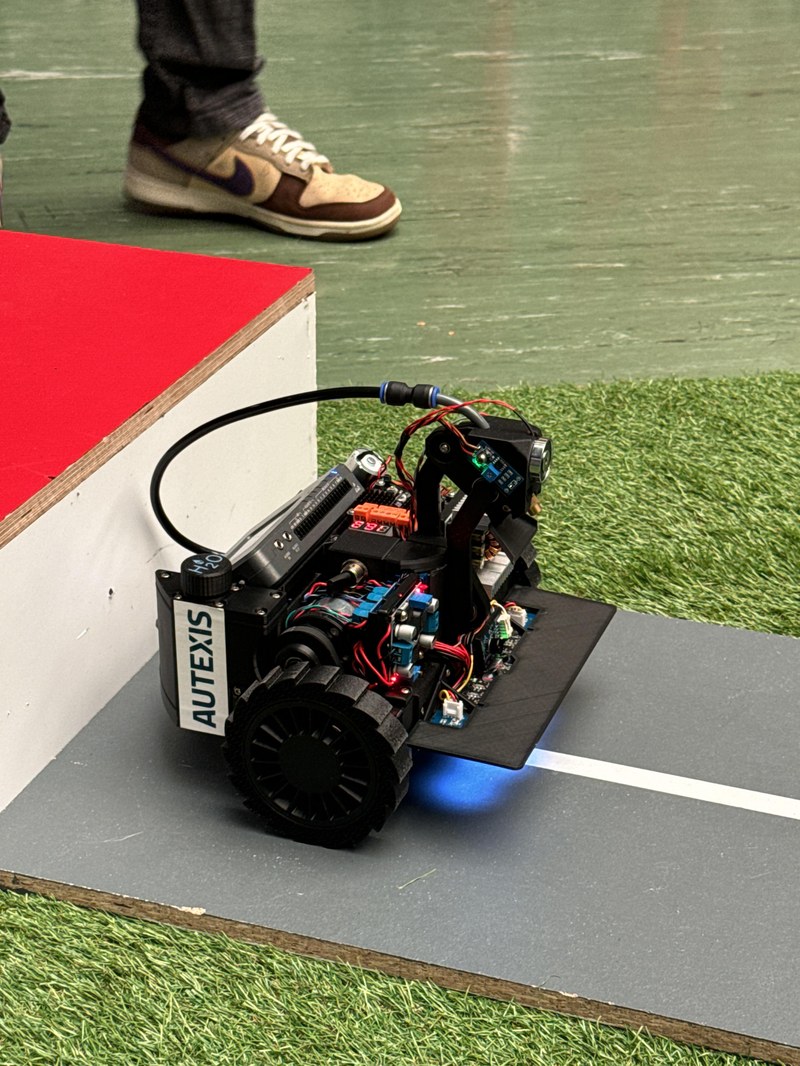
Fünf Teams traten mit eigenständig entwickelten Robotern an, die alle die gestellten Aufgaben zuverlässig und autonom meisterten. Dabei zeigte sich eindrücklich, wie unterschiedlich die technischen Ansätze funktionierten – und dennoch zum Ziel führten:
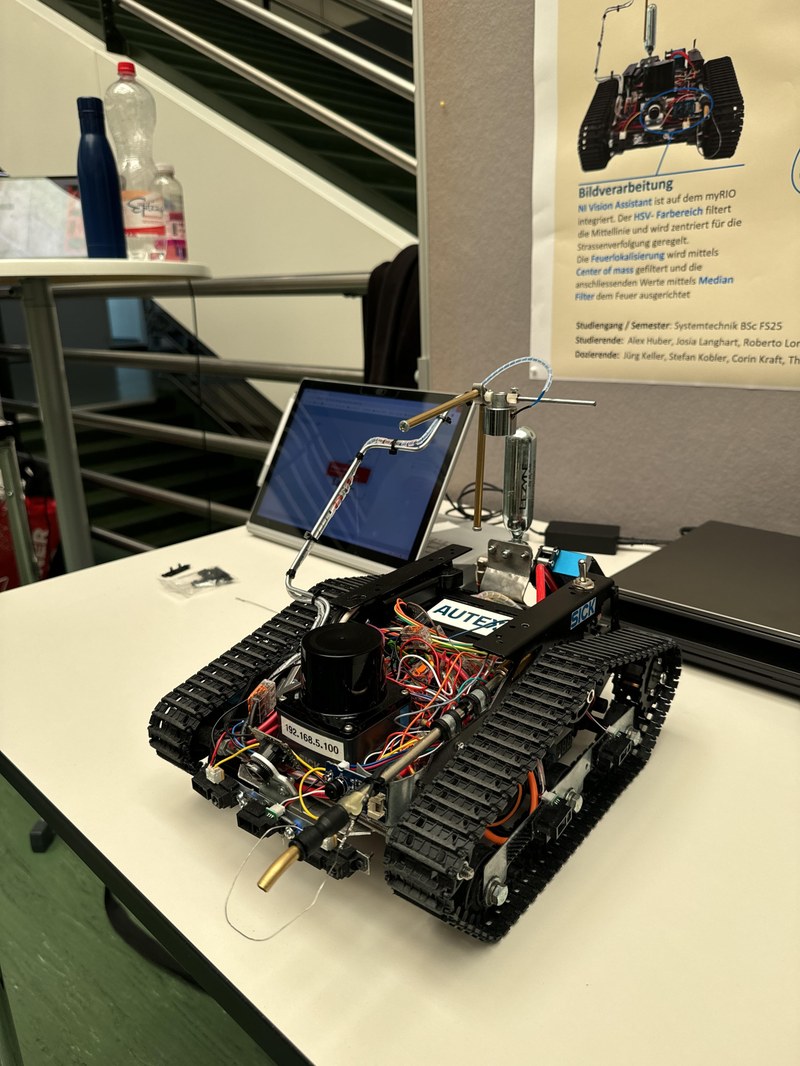
- Team BlächbüchseRetter kombinierte präzise LiDAR-Navigation mit CO₂-Löschtechnik und einem elektromagnetischen Hebearm.
- Team BURNEDOUT setzte auf 3D-gedruckte Spezialräder, die Hindernisse und Stufen überwinden konnten, ergänzt durch eine kompakte Wassereinheit zur Brandbekämpfung.
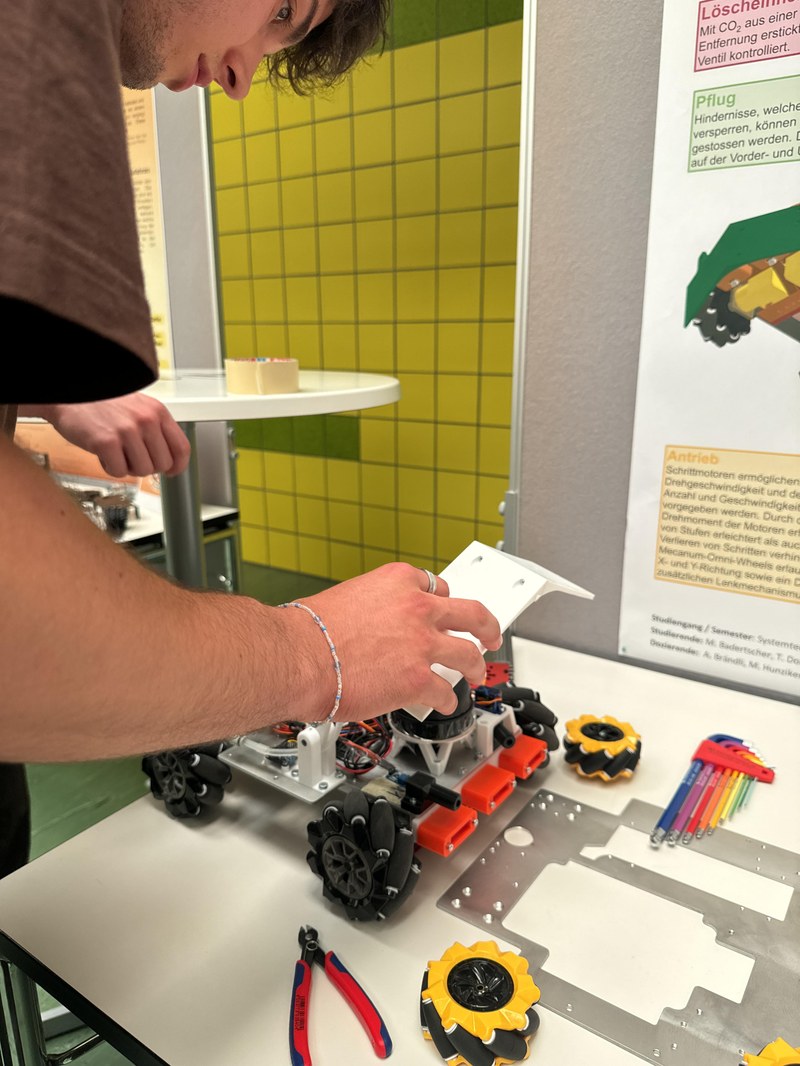
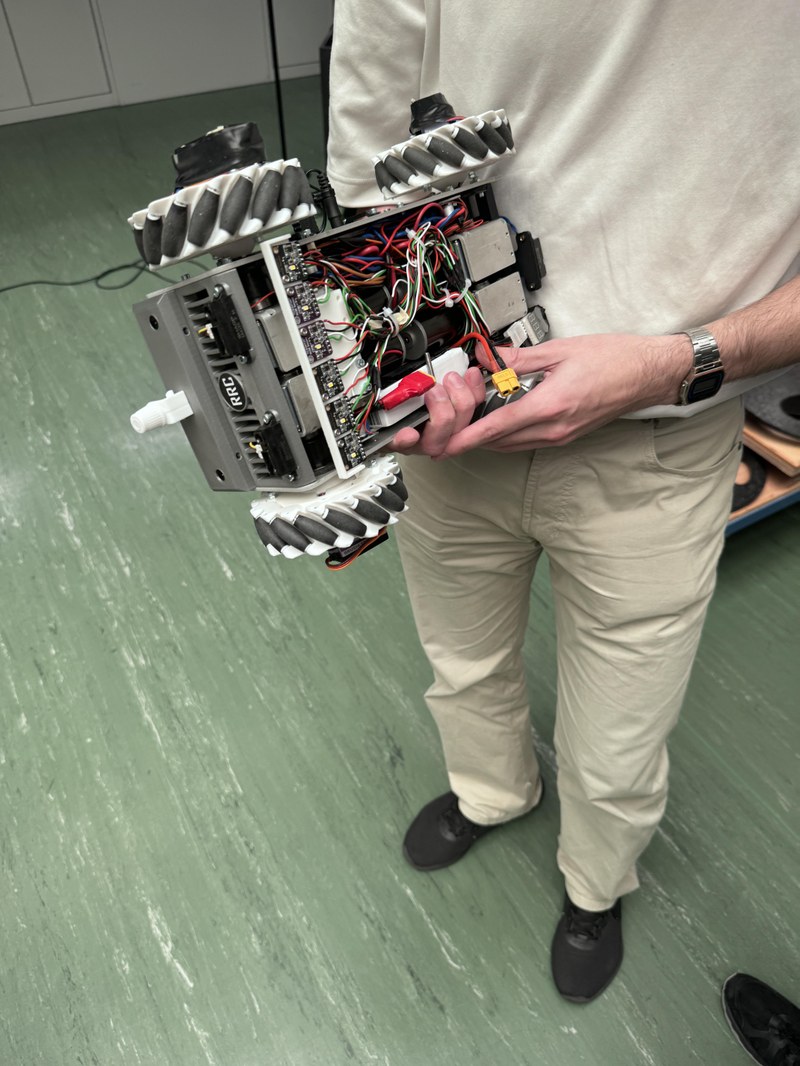
- Team Kaffeeland nutzte omnidirektionale Mecanum-Räder für flexible Manöver, kombiniert mit CO₂-Löschsystem, Trümmerpflug und effizienter Energieverteilung.
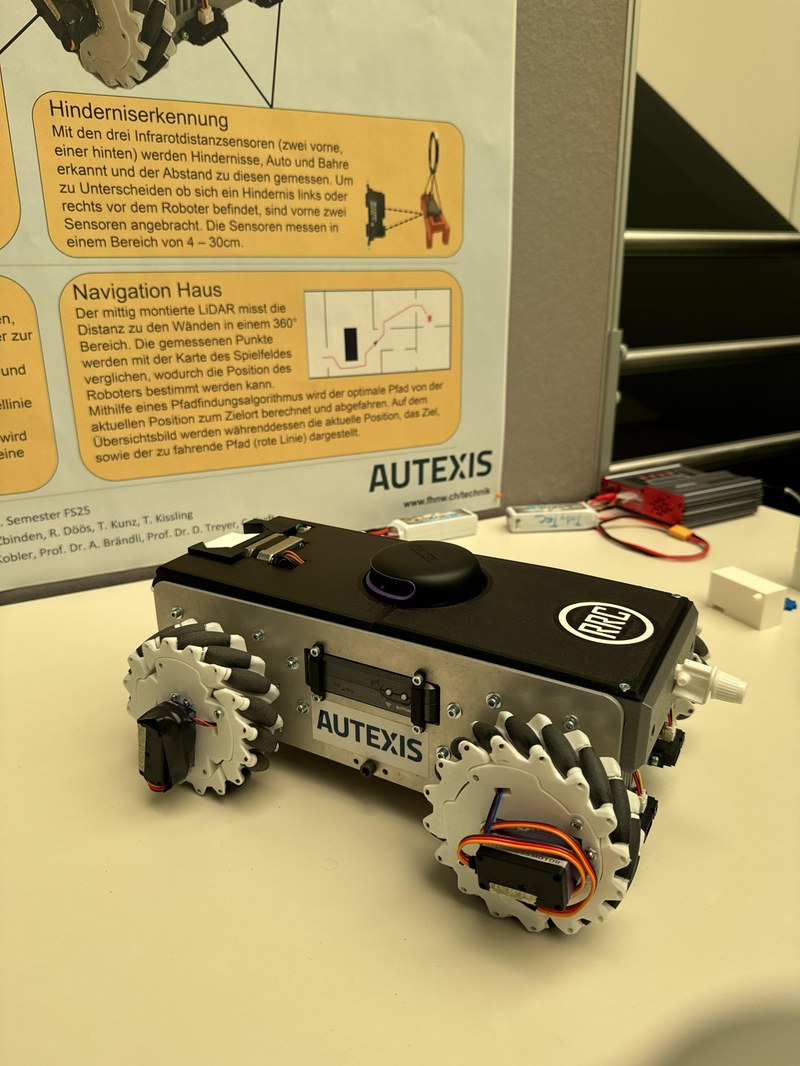
- Team RRC überzeugte mit einem ausklappbaren Omniwheel-Fahrwerk, Wärmebild-Feuererkennung und einem lineargeführten Rettungssystem.
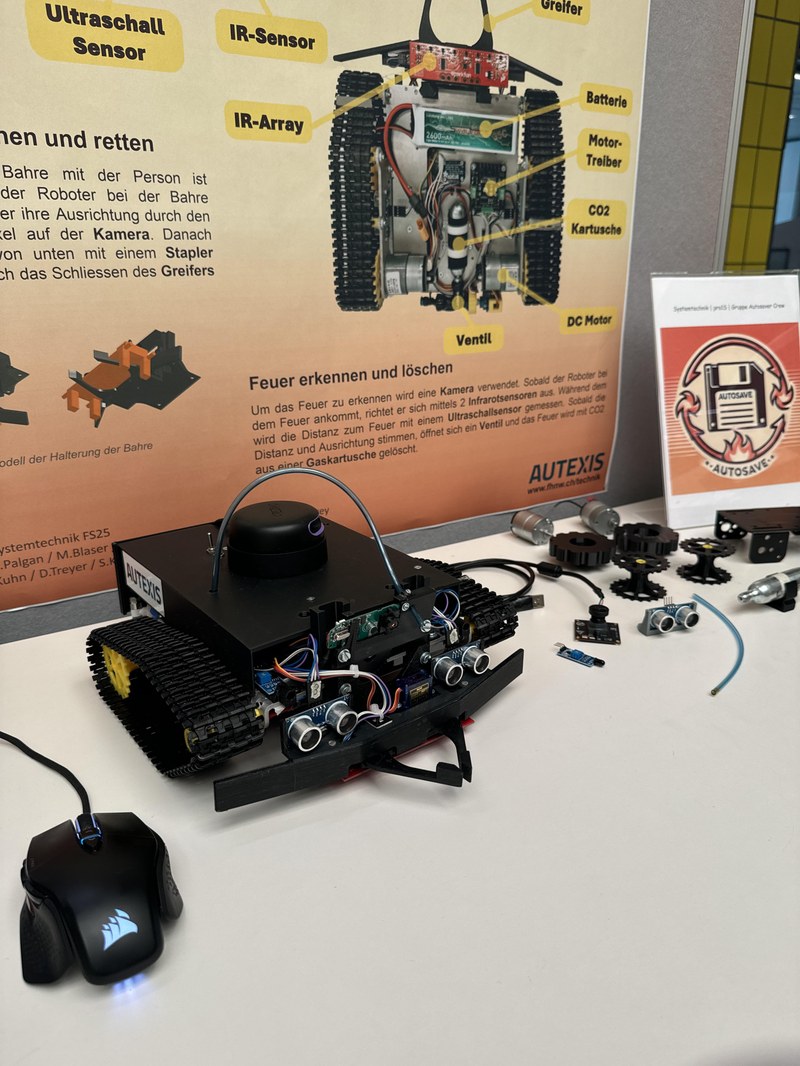
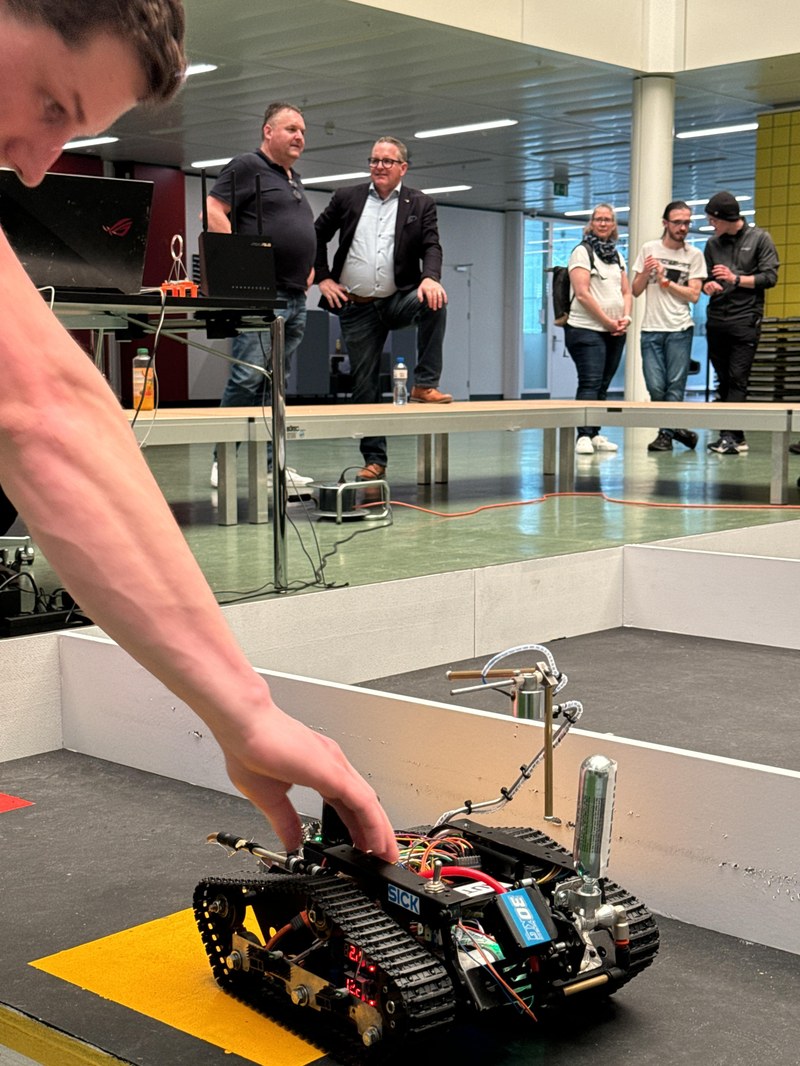
- Team Autosave arbeitete mit einem Kettenantrieb, kombinierter Kamera- und Infrarotsensorik sowie einem mechanischen Stapler zur präzisen Tragenbergung.
Die Roboter navigierten selbstständig durch den komplexen Parcours, lokalisierten Brände, umgingen Hindernisse und führten die Rettungsaufgaben effizient aus.
Technik, Teamarbeit und Praxisbezug
Für die Steuerung und Sensorik kamen unter anderem NI myRIO, LiDAR, Infrarot-Arrays, Ultraschallmodule, Kamerasysteme und verschiedene Aktorik-Lösungen zum Einsatz. Auch softwareseitig arbeiteten die Teams mit eigenen Implementierungen zur Navigation, Bildverarbeitung, Objektlokalisierung und Pfadfindung – zum Teil in Echtzeit auf FPGAs und eingebetteten Systemen.
Bewertet wurden neben der technischen Umsetzung auch Aspekte wie Navigation, Design, Steuerungssicherheit und Softwarequalität. Für die Studierenden standen nicht nur der technische Innovationsgrad, sondern vor allem die praxisnahe Anwendung und die konstruktive Zusammenarbeit im Team im Zentrum.
Besonders überzeugend war die Leistung des Team BlächbüchseRetter, das mit präziser Navigation, intelligenter Sensorik und durchdachter Gesamtlösung den ersten Platz belegte.
Auch die Teams Autosave und BURNEDOUT zeigten bemerkenswerte Leistungen und erreichten den zweiten bzw. dritten Platz im Wettbewerb.
Die FHNW gratuliert allen Teilnehmenden herzlich zu ihrem grossen Engagement, technischer Kreativität und beeindruckender Teamarbeit.
Ein besonderer Dank gilt der Firma AUTEXIS AG, die den Wettbewerb als Sponsor unterstützte und Preisgelder für die überzeugendsten Lösungen zur Verfügung stellte. Philippe Ramseier, CEO der AUTEXIS AG und Mitglied des Fachhochschulrats der FHNW, war persönlich vor Ort und zeigte sich beeindruckt vom Ideenreichtum und dem hohen fachlichen Niveau der Studierenden.




20250605_130418808_iOS.jpg