Aufgabenstellung
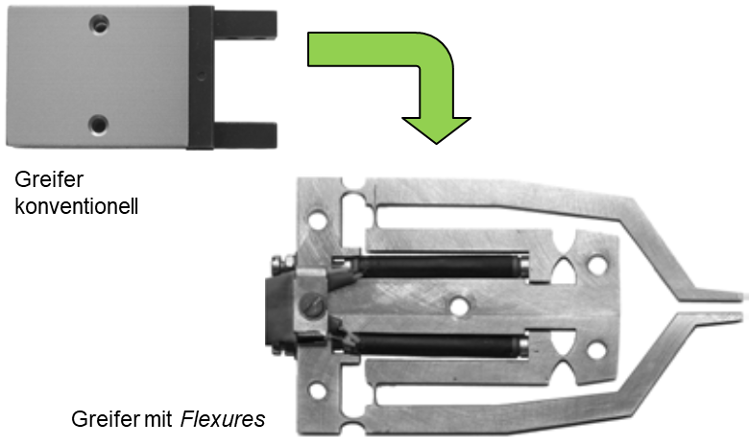
Im Auftrag der Firma Afag Automation AG soll ein Prototyp für einen Flex-Greifer erstellt werden. Hauptelement dieses Greifers ist ein Festkörpermechanismus, welcher auf einer Hoecken-Linearkinematik beruht.
Ein Festkörpermechanismus (auf Englisch „flexure“ oder „compliant mechanism“) ist ein einzelnes Bauteil, welches an bestimmten Stellen besonders nachgiebig (weich) ist, sodass eine Bewegung ausgeführt werden kann, obwohl keine klassischen Gelenke vorhanden sind. Die nachgiebigen Stellen werden als Festkörpergelenke bezeichnet.

Beispiel einer Schere als Festkörpermechanismus.
Quelle: https://www.compliantmechanisms.byu.edu/
Beispiel eines Schalters als Festkörpermechanismus
Quelle: https://www.compliantmechanisms.byu.edu/
Beispiel eines Greifers als Festkörpermechanismus («Flex-Greifer»)
Quellen: Thielen, 2014; Zentner, 2020
Vorgehen
Mittels Simulationen wurden das Material und die Geometrie des Festkörpermechanismus so gewählt, dass die Anforderungen bestmöglich erreicht werden konnten.
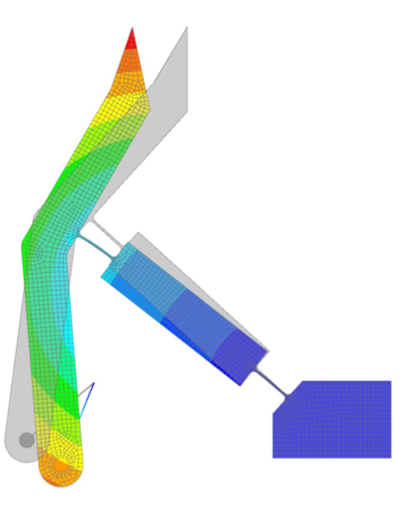
Simulation des Hoecken-Festkörpermechanismus
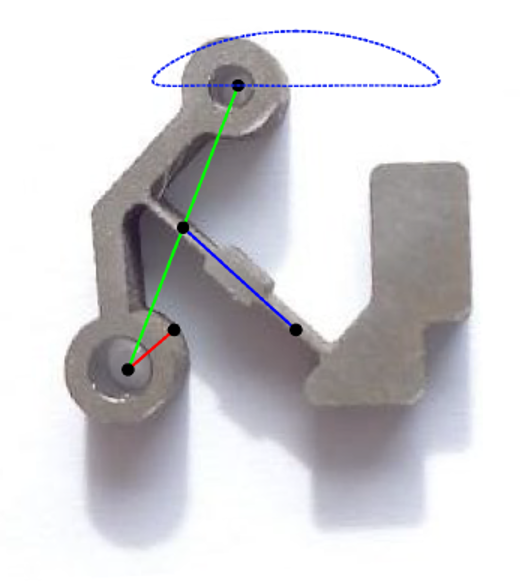
Hergestellter Festkörpermechanismus (zugrundeliegender Starrkörpermechanismus in rot, blau und grün dargestellt; blau gestrichelt die durch den obersten Punkt durchführbare Bewegung).
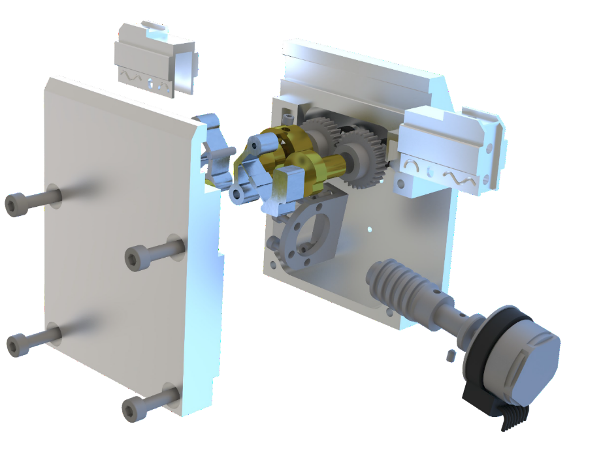
3-D-Explosionsansicht des kompletten konstruierten Greifers inklusive Antrieb (der Festkörpermechanismus ist klein im Zentrum zu sehen).
Resultat
Die Messungen mit dem Prototyp ergaben, dass der Greifweg sowie die Greifzeit den angepassten Anforderungen entsprechen. Die Greifkraft und Lebensdauer konnten noch nicht validiert werden; hierfür ist ein überarbeiteter Prototyp geplant.

Fertig montierter Prototyp
Projektinformation
Diplomand | Dorian Jaggi |
Auftraggeber | Afag Automation AG |
Experte | Harald Steiner |
Examinator | Kaspar Löffel |