Die Reise des intelligenten Blindenstocks geht weiter!
Nachdem die ersten Schritte zur Entstehung des intelligenten Blindenstocks vollzogen wurden, steht dieser nun, nach einem weiteren Entwicklungsjahr, vor der Zielgeraden.
von Ryo Widmer
 |
Ryo Widmer kam durch seine Lehre als Automatiker bei der Müller Martini das erste Mal mit Strom und Elektrotechnik in Kontakt. Durch den Wunsch noch tiefer in die Welt der Elektrotechnik einzutauchen, startete er im Anschluss das Studium an der FHNW im Studiengang Elektro- und Informationstechnik. Während des Studiums wurde klar, dass die Softwareentwicklung jeglicher Art ihm am meisten Freude bereitet. |
Es gibt zwar schon Blindenstöcke, die mit Elektronik ausgestattet sind, und so die Umgebung erweitert «wahrnehmen». Aber sie sind noch fehleranfällig, weil sie nicht auf die Bedürfnisse der Blinden angepasst sind. So gibt es zum Beispiel einen Blindenstock, welcher wie eine Taschenlampe die Umgebung nur durch einen Lichtstrahl «ausleuchtet», obwohl genau die mechanische Verbindung zum Boden den Personen eine Sicherheit bietet. Oder ein anderer elektronischer Blindenstock, welcher Informationen über bevorstehende Hindernisse per Audio wiedergibt, obwohl blinde Personen bei der Fortbewegung auf das Gehör angewiesen und durch zusätzliche Informationen überfordert sind. Auch erkennen die meisten dieser Produkte zu wenig zuverlässig, ob ein Ast, ein hohes Gelände oder andere hochliegende Gegenstände im Weg sind und somit eine Gefahr darstellen. Deshalb war die Idee für das Vorgängerprojekt (siehe früherer Blog-Beitrag von Jenny Meier), ein erstes Working Model zu entwickeln, das dem Stock «Augen» gibt und das so intelligent ist, dass Gefahren frühzeitig detektiert werden.
Ein kurzer Recap
Nach wie vor soll der neu konzipierte Prototyp Hindernisse im Bereich von Brusthöhe bis Kopf auf dem Gehweg erkennen. Zentral ist, dass der Abstand zur Erkennung von Hindernissen in drei Stufen: 1.5 m, 2 m, 3 m einstellbar sein. Auch sollen Objekte, die seitlich des Gehwegs sind, nicht als Hindernis eingestuft werden, da zum Beispiel eine Seitenwand oft als Orientierungshilfe dient.
Das Working Model ist unter «idealen» Laborbedingungen entwickelt worden. Dagegen muss der Prototyp nun unter realen Aussenverhältnissen funktionieren. D. h. der Stock soll auch Hindernisse unter erschwerten Bedingungen wie Regen oder bei starker Sonneneinstrahlung korrekt erkennen. Bereits das Working Model baut auf zwei unterschiedlichen Sensortypen auf. Einerseits ein optischer Distanzsensor. Dieser verwendet Infrarotlicht zur Erkennung und Messung der Distanz eines Objektes. Als zweiten Distanzsensor ist ein Ultraschalldistanzsensor eingesetzt, der Ultraschall als Quelle und die Reflexionen nutzt, um die Distanz zu einem Objekt abzuschätzen, ähnlich wie sich Fledermäuse in der Natur orientieren. Weiter ist ein Gyroskop verbaut. Dieses misst den Ausschwenkwinkel des Blindenstockes und dient dazu, um Objekte in der Nähe, die keine Gefahr darstellen, auszublenden. Die Nutzerin oder der Nutzer werden per Vibrationsmotor gewarnt, sobald sich ein Hindernis im Weg befindet.
Die neuen Aufgaben des Prototypen
Das Working Model hat die Realisierbarkeit des Gerätes bewiesen. Jedoch ist es immer noch voller Kabel und Drähte, besitzt unnötige Komponenten und taugt noch nicht für den Einsatz in der Praxis. Zum Beispiel ist das Wetter ein grosser Störfaktor, der die Sensorik stark behindert. Für das aktuelle Projekt sind deshalb folgende Ziele definiert worden.
- Wetterfestigkeit: Der Prototyp soll bei Regen und Sonne immer seine Funktion erfüllen und bei jedem Wetter zuverlässig handeln. Ausserdem soll die Elektronik durch Regen oder kleinen Wasserspritzern keinen Schaden nehmen.
- Stromversorgung: Neu ist der Blindenstock mit einer mobilen, integrierten Energieversorgung auszustatten, wie einen Akku oder eine Batterie, die für mindestens einen 8 h-Tag im Vollbetrieb verwendet werden kann.
- Kompaktheit: Das Gerät soll einerseits nicht grösser als ein Portemonnaie sein und andererseits nicht mehr als 250 g wiegen, damit der Stock immer noch leicht in der Hand zu führen ist.
Der Aufbau des Prototypen
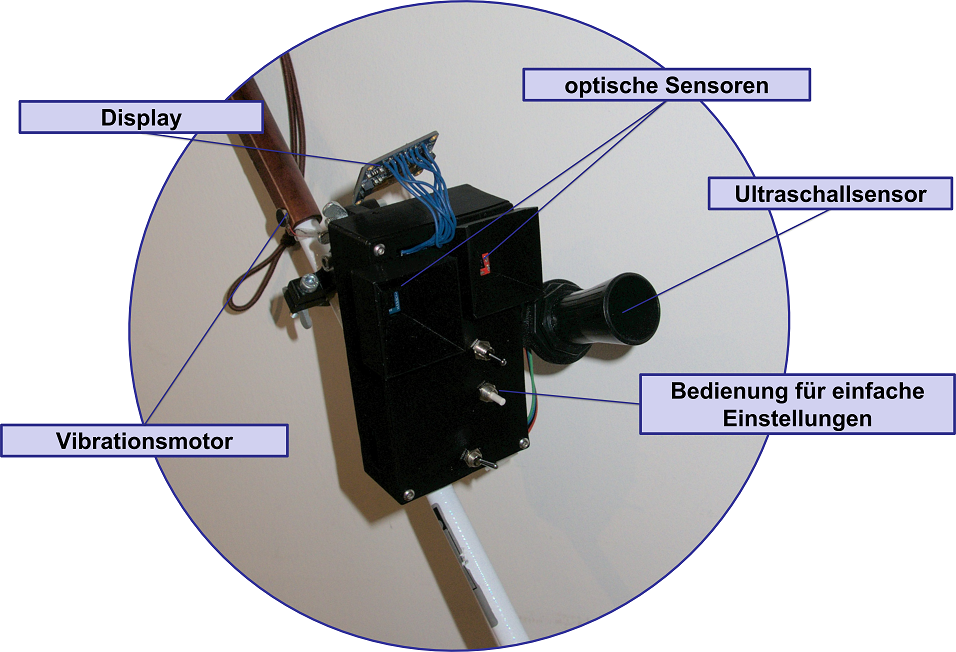
Steuer- und Verarbeitungseinheit ist der Mikrocontroller. Er operiert wie ein kleiner Computer und ist somit das «Gehirn» des ganzen Systems. Er handelt je nach Situation anders und kontrolliert dementsprechend alle Komponenten. Neu sind im Prototyp zwei optische Sensoren verbaut, die beide in leicht andere Richtungen «schauen», um Objekte auf verschiedenen Höhen zuverlässig erfassen zu können. Auch ist als Stromversorgung neu ein Lithium-Ionen-Akku verbaut, der per USB-C und einem herkömmlichen Handyladegerät geladen werden kann. Als Testhilfe, welches im Endprodukt nicht verwendet wird, ist ein Display eingebaut, welches wenige Informationen für Testzwecke darstellt.
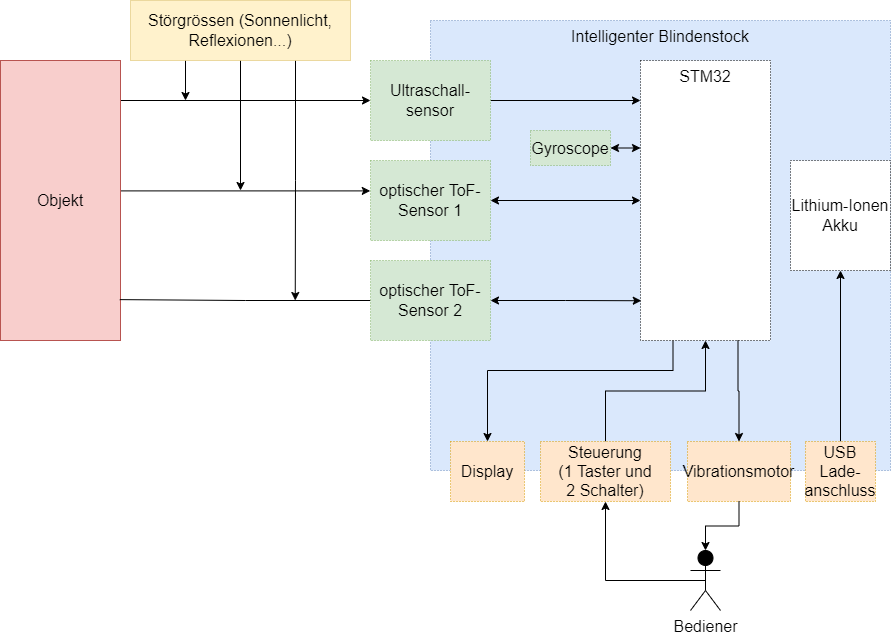
Im Gegensatz zum Vorgängermodell ist im Prototyp kein Raspberry Pi, sondern ein Mikrocontroller verbaut, der einerseits 20-mal kleiner als ein Raspberry Pi ist, und andererseits keine unnötigen Komponenten enthält. Der Mikrocontroller besticht ausserdem durch die schnellere Reaktionszeit und die Energiesparsamkeit, beides essenzielle Punkte für das Produkt. Um die Elektronik vor starken Witterungen und die Steuerung vor Störungen zu schützen, sind alle Elemente in einem 3D-Druckgehäuse verbaut. Die optischen Sensoren verwenden Infrarotlicht für die Objekterkennung. Das gleiche Licht wird auch von der Sonne in grossen Mengen ausgestrahlt. Somit fungiert die Sonne als Störgrösse, die vor allem bei direkter Einstrahlung in die Sensorik die Messungen stark einschränkt. Aus diesem Grund ist ein mechanischer Lichtschutz vor die optischen Sensoren montiert, der die direkte Einstrahlung verhindert oder zumindest dämpft.
Um Strom zu sparen, wird, sobald sich der Blindenstock für mehr als sechs Sekunden nicht bewegt, der Energiesparmodus aktiviert. Mit geschicktem «Schlafenlegen» benötigen die Komponenten kaum oder sehr wenig Energie. Dadurch kann eine Laufzeit von 12h sichergestellt werden, was für den Einsatz während eines ganzen Tages genügt. Dieses Vorgehen hat zudem den Vorteil, dass die Komponenten – im Gegensatz zum kompletten Ein- und Ausschalten – beim Reaktivieren schnell wieder betriebsbereit sind.
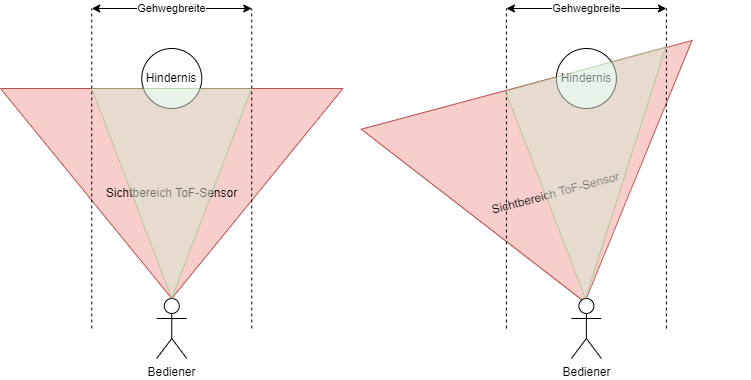
Weiter ist das Sichtfeld in Abhängigkeit zum Ausschwenkwinkel angepasst und verbessert worden. Dies ist möglich, weil die optischen Sensoren die Distanzen in ihrem Sichtfeld in ein 4×4-Feld aufteilen. Das wird ausgenutzt, um jeweils nur die Felder zu aktivieren, die den Gehweg scannen. Wie dies funktioniert, ist in Abb. 3 illustriert. Dadurch wird der Gehbereich länger gescannt und somit die Hindernisse länger und zuverlässiger detektiert, auch wenn der Blindenstock stark hin und her geschwenkt wird.
Sicher mit dem Blindenstock unterwegs!
Der entwickelte Prototyp ist in der Lage, Hindernisse, wie Holzbalken auf Bauch- oder Brusthöhe, zuverlässig und bei verschiedenen Lichtverhältnissen (starke Sonne, Schatten und Innenraum) korrekt zu detektieren. Das System erfasst Objekte im Gehbereich sogar bei starken Ausschwenkwinkeln und über eine längere Zeit, während es solche ausserhalb dieses Bereichs «ignoriert». Wird ein Objekt entdeckt, sendet das Gerät wie bisher via Vibrationsmotor ein Warnsignal. Die Nutzerin, der Nutzer kann zudem per Drucktaster einstellen, in welcher Distanz, 1.5m, 2m oder 3m entfernt, vor einem Hindernis gewarnt werden soll. Darüber hinaus ist der Prototyp so konstruiert, dass er an jeden beliebigen Blindenstock montiert werden kann. Ein spezieller Einstellmodus unterstützt die korrekte Montage an den Blindenstock.
Als nächster Schritt sollte das Gerät noch kleiner und leichter gebaut werden. Das bedeutet, dass die einstellbaren Bauteile durch feste und somit nochmals kleinere Komponenten zu ersetzen sind. Noch werden Extremfälle, wie sehr kleine und hochliegende Hindernisse, bei starker Sonneneinstrahlung nicht genügend frühzeitig erkannt, es wird jedoch erwartet, dass durch eine neue Generation der Sensorik dieses Problem in naher Zukunft behoben werden kann. Der wichtigste Schritt wird aber sein, eine Produktionsfirma zu finden, die den Feinschliff übernimmt und das Produkt danach – hoffentlich erfolgreich – auf den Markt bringt.
Kommentare
Keine Kommentare erfasst zu Die Reise des intelligenten Blindenstocks geht weiter!