Extraktion Gebäudehüllen
Für die Modellierung von Punktwolken zu BIM tauglichen 3D-Modellen benötigt es heutzutage noch immer manuelle Arbeit. Das Projektziel war es, diese Arbeit zu verringern und eine automatische Extraktion von topologisch korrekten Dachflächen aus UAV-Punktwolken durchzuführen.
Automatisch triangulierte Vermaschungen von Punktwolken haben nicht die geometrischen Eigenschaften welche BIM-Anwendungen wie z.B. einfache Flächenquantifikationen oder Winkelmessungen ohne Nutzung von komplexen 3D Verarbeitungs-Tools ermöglichen. Hierfür werden topologisch saubere dreidimensional Modelle bestehend aus ebenen Polygonen benötigt.
In Zusammenarbeit mit der Firma KOPA Bauservices GmbH, welche bereits einen Service für die Erstellung von Punktwolken aus UAV-Aufnahmen anbieten, wurde untersucht, wie diese automatische Extraktion für Dachflächen erreicht werden kann. Dafür werden Lösungen zur Automatisierung gesucht für
- die Detektion von ebenen Flächen
- die Bestimmung von Schnittpunkten der Ebenen und der übrigen Polygonumrisse
- sowie der anschliessende Export in die benötigten Datenformate.
Durch Nutzung der frei verfügbaren, vereinfachten Gebäudedaten der SWISSBUILDINGS3D konnte eine automatische Verbesserung der ansonsten nicht immer zufriedenstellenden Georeferenzierung der Punktwolken aus den UAV-Aufnahmen erreichen werden.

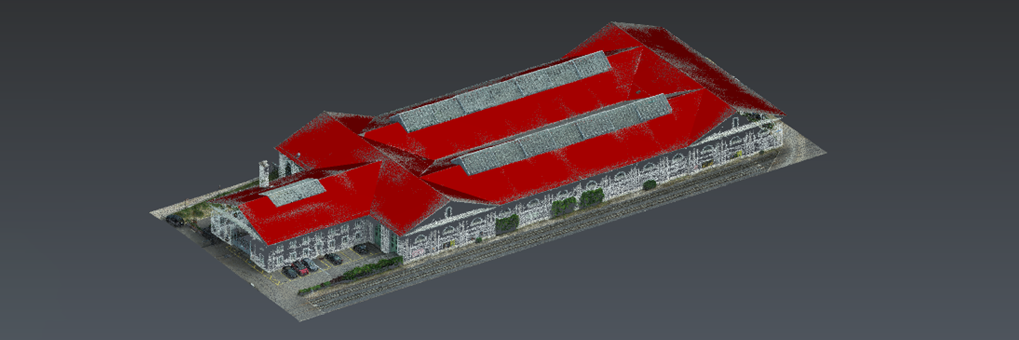
Punktwolke eines Gebäudes mit dem extrahierten Modell.
Die Implementation wurde in Python umgesetzt mit Nutzung der Bibliotheken open3d für die Punktwolkenverarbeitung, shapely für die Erstellung der Geometrien und networkx für die Beschreibung der Topologien. In einem ersten Schritt wird detektiert, wo flächenhafte Elemente vorkommen. Dies wurde umgesetzt anhand händisch abgesetzter Punkte pro Fläche oder automatisiert mit einem Clustering mittels DB-Scan Algorithmus, wofür nebst den Koordinaten der Punkte auch die aus der Punktwolke berechenbaren Punktnormalen genutzt werden.
Mit einem Ransac-Algorithmus werden die Ebenen optimal in die Punktwolke gelegt und deren Polygon-Umrisse mittels eines Alphashape-Algorithmus bestimmt. Für aneinandergrenzende Polygone werden Schnittkanten detektiert und Schnitte vorgenommen. Treffen sich vier oder mehr Polygone in einem Schnittpunkt, werden sie mit der Methode der kleinsten Quadrate bedingt ausgeglichen, um einen möglichst optimalen Schnittpunkt zu finden.
Das Endergebnis sind die extrahierten und vereinfachten Polygone, sowie die detektierten Schnittkanten. Das erstellte Modell kann in eine Datenbank oder in die Formate OBJ, PLY oder IFC exportiert und weiterverwendet werden.
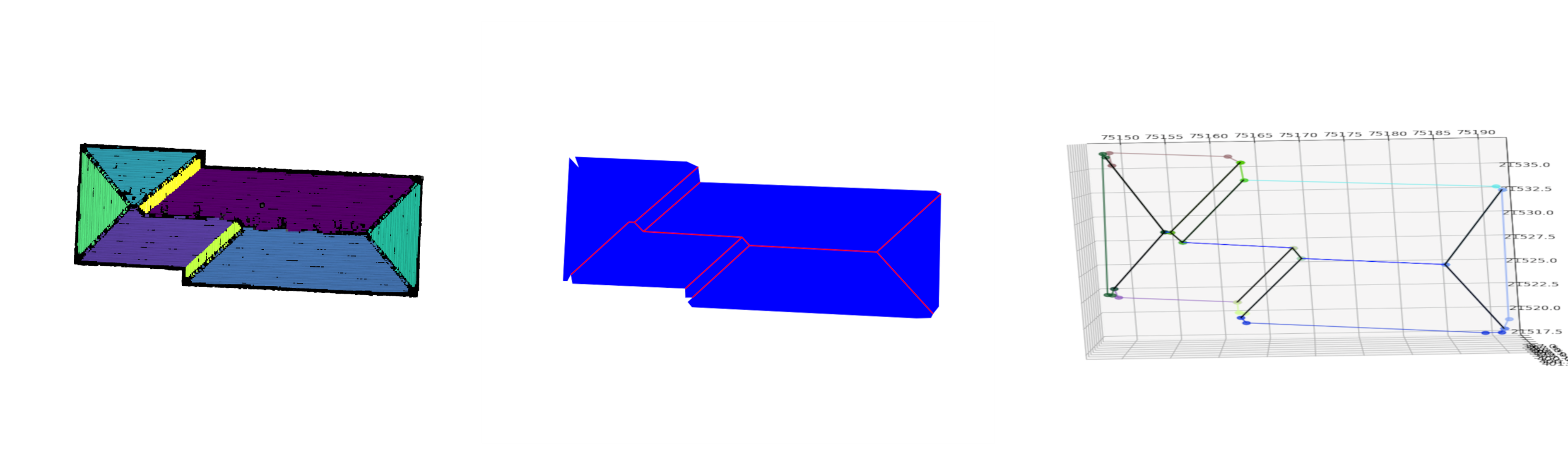
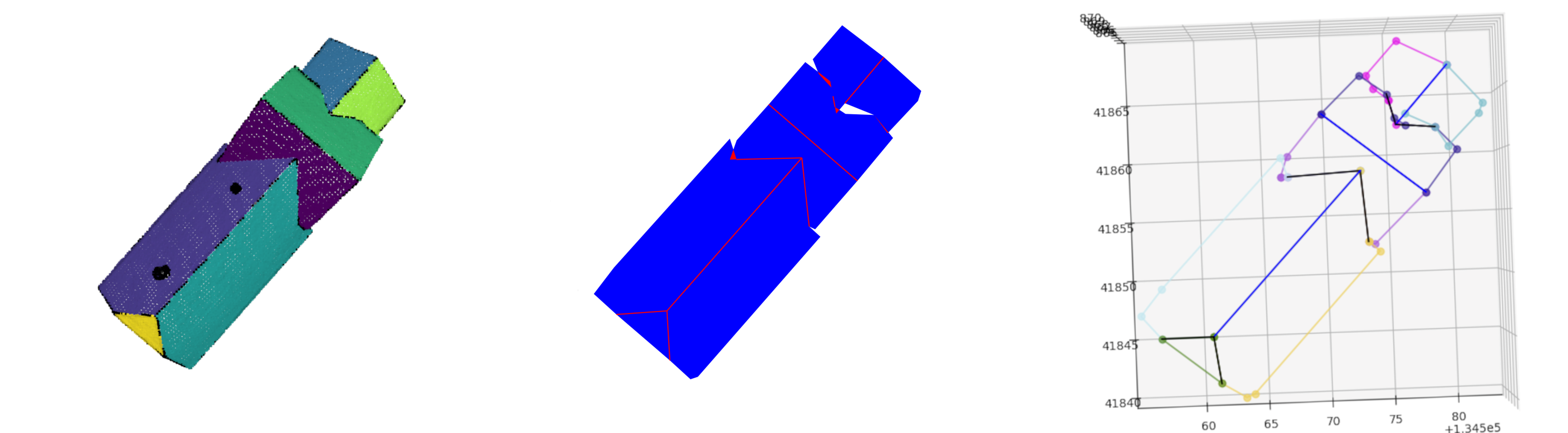
V.l.n.r.: Punktwolke mit Cluster aus DB-Scan. Extrahierte Ebenen (Polygone) und Schnittkannten. 3D-Modell (interaktiv).
Projektlaufzeit: | Nov. 2021 - Dez. 2022 |
Projektleiter/ -in: | Ursula Kälin, David Grimm |
Projektmitarbeitende: | Marius Hürzeler, Stefan Schürmann, Lukas Zumsteg, Joël Bachmann |
Keywords: | 3D und CAD, BIM, Digital Twin, Georeferenzierung, Visualisierung, (Photogrammetrie, UAV) |