
SmartMobileMapping
Das SmartMobileMapping-Projekt (SMM) soll es ermöglichen, vollautomatisch ein aktuelles, detailliertes, drei-dimensionales Abbild des Strassenraums zu erstellen und dieses über das Internet in die Büros von Anwenderinnen und Anwendern aus Strassenunterhalt, Verkehrstechnik und Planung zu bringen. Dazu soll ein cloud-basiertes Softwareframework entwickelt werden, welches die gesamte Prozesskette der Erfassung, Nachführung und verteilten Nutzung von Infrastrukturdaten auf der Basis mobil erfasster, georeferenzierter Stereobilddaten unterstützt.
Die einzelnen Komponenten im Überblick:
Ein Stereovision Mobile Mapping System wird bereits seit Mitte 2009 am Institut Vermessung und Geoinformation (IVGI) entwickelt und besteht aus einem Navigations-system (Inertialmesseinheit und GNSS-Empfänger) zur direkten Georeferenzierung mehrerer Stereo-Kamerasysteme. Nach einer Kalibrierung des Systems, können belie-bige Punkte im Objektraum photogrammetrisch dreidimensional erfasst werden.

Abb: Stereokamera-basiertes Mobile Mapping System des IVGI
Abb: Stereokamera-basiertes Mobile Mapping System des IVGI
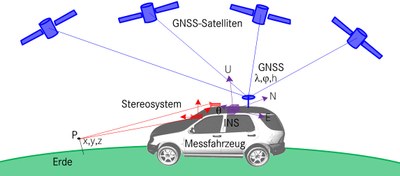
Abb: Messprinzip des stereokamera-basierten Mobile Mapping Systems
Abb: Messprinzip des stereokamera-basierten Mobile Mapping Systems
Das bestehende Stereo-Messsystem der ersten Generation wird im Verlaufe des Projekts weiterentwickelt. In mehreren Etappen soll das System modularisiert und um eine Multi-Stereokonfiguration (inkl. Aufnahmen seitwärts und rückwärts) erweitert werden. Fernziel des SmartMobileMapping-Projekts ist die Realisierung einer modularen 360°-Stereokonfiguration.
Das 3DCityTV SDK (Software Development Kit) SDK ermöglicht eine einfache und flexible Realisierung anwendungsspezifischer 3DCityTV-Client-Applikationen bzw. die Integration von 3DCityTV-Clients in bestehende Softwarelösungen (z.B. Geoinformationssysteme, Infrastruktur-Asset-Management-Software, Weblösungen). Das SDK soll vor allem Funktionalitäten enthalten zur stereo- oder monoskopischen Messung in den Bildern sowie zur Überlagerung bestehender Geodaten. Mit der Realisierung eines WebGL-/HTML5-Clients sollen plugin-freie Weblösungen ermöglicht werden.

Abb: Stereoskopische Auswertung mit dem 3DCityTV Client
Abb: Stereoskopische Auswertung mit dem 3DCityTV Client
Das Projekt ist eine Zusammenarbeit mehrerer Partner welche die Entwicklung der Komponenten aus ihrem jeweiligen Fachgebiet übernehmen. Folgend eine Übersicht der beteiligten Partner und ihrer Kernkompetenzen:
- Technologie- und Service-Provider mit ausschliesslicher Fokussierung auf Mobile Mapping Solutions
- Spin-off Unternehmen der Fachhochschule Nordwestschweiz
- Integration und Weiterentwicklung der Projekt-Komponenten bis zur Marktreife

- Führende regionale Ingenieurunternehmung und Dienstleister
- Aufbau praxistauglicher Prozesse und Systeme
- Einsatz und Weiterentwicklung der Systeme im Bereich der Infrastrukturplanung

- Führende regionale Ingenieurunternehmung und Dienstleister
- Weiterentwicklung der Produkte auf die Kundenbedürfnisse abgestützt
- Als Betreiber der Datendrehscheiben in verschiedenen Kantonen (be-geo.ch, so-geo.ch, ag-geo.ch) möchte ALPGIS die Strassenbefahrungen in die kommunalen Viewersysteme einbinden

FHNW IVGI (Projektlead)
- Aufbau eines eigenen Mobile Mapping Systems und Kompetenzaufbau seit Mitte 2009
- Integration von Know-how und Resultaten aus anderen F&E-Projekten (OpenWebGlobe, UAVision)
- Erfahrung in Nahbereichsphotogrammetrie sowie in georeferenzierter Bild- und Vi-deodatenverarbeitung
Stephan Nebiker: Projektleiter
- Cavegn, S. and Nebiker, S.: AUTOMATED 3D ROAD SIGN MAPPING WITH STEREOVISION-BASED MOBILE MAPPING EXPLOITING DISPARITY INFORMATION FROM DENSE STEREO MATCHING, Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XXXIX-B4, 61-66, doi:10.5194/isprsarchives-XXXIX-B4-61-2012, 2012.
- Nebiker, S., Cavegn, S., Eugster, H., Laemmer, K., Markram, J., and Wagner, R.: FUSION OF AIRBORNE AND TERRESTRIAL IMAGE-BASED 3D MODELLING FOR ROAD INFRASTRUCTURE MANAGEMENT – VISION AND FIRST EXPERIMENTS, Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XXXIX-B4, 79-84, doi:10.5194/isprsarchives-XXXIX-B4-79-2012, 2012.
- Eugster, H., Huber, F., Nebiker, S., and Gisi, A.: INTEGRATED GEOREFERENCING OF STEREO IMAGE SEQUENCES CAPTURED WITH A STEREOVISION MOBILE MAPPING SYSTEM – APPROACHES AND PRACTICAL RESULTS, Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XXXIX-B1, 309-314, doi:10.5194/isprsarchives-XXXIX-B1-309-2012, 2012.
- Burkhard, J., Cavegn, S., Barmettler, A., and Nebiker, S.: STEREOVISION MOBILE MAPPING: SYSTEM DESIGN AND PERFORMANCE EVALUATION, Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XXXIX-B5, 453-458, doi:10.5194/isprsarchives-XXXIX-B5-453-2012, 2012.