
Roboterunterstützte Demontage von mechanischen Uhrwerken
Fabian Ifanger untersuchte die Demontage von Uhrwerken mittels kollaborativem Zweiarm-Roboter.
ABB ist ein führender Anbieter von Industrierobotern, Robotersofware und modularen Fertigungszellen. Um den Anforderungen an eine vollflexible Fertigung in der Elektronikindustrie und weiteren Industrien gerecht zu werden, hat ABB einen kollaborativen Zweiarm-Roboter "YuMi" für die Kleinteilmontage entwickelt. In dieser Bachelor-Thesis soll untersucht werden, inwiefern sich dieser Roboter für die Demontage eines ausgewählten mechanischen Uhrwerkes ohne das Lösen von Schrauben eignet. Zudem soll ein Konzept für einen entsprechenden Arbeitsplatz realisiert werden, damit sich der Roboter dort einsetzen lässt.

Abb. 1: Kollaborativer Roboter "YuMi"
In der Projektarbeit P5 wurden neue Finger und Vakuumaufsätze erarbeitet, um die sehr unterschiedlichen Bauteile des mechanischen Uhrwerkes zu handhaben. Während der Bachelorthesis wurden diese getestet und optimiert. Für die Demontage wurden zudem eine Befestigung für das Uhrwerk und eine Ablage für die demontierten Bauteile konstruiert. Diese Komponenten wurden auf der vorgegebenen Tischplatte montiert und die Wiederholgenauigkeit des Einspannens gemessen. Der ganze Arbeitsplatz wurde zudem in einer virtuellen Station in der ABB eigenen PC-Anwendung RobotStudio aufgebaut, um die Roboterbewegungen simulieren zu können. Zum Schluss wurde die Demontage des Uhrwerkes genau analysiert und Schritt für Schritt programmiert, simuliert und getestet.

Abb. 2: Greifer mit zwei Vakuum-Modulen, einem Servo-Modul und angepassten Fingern/Vakuumaufsätzen
Die konstruierten Finger und Vakuumaufsätze erfüllen ihre Aufgaben und eignen sich somit für die Demontage des Uhrwerkes. Der erarbeitete Arbeitsplatz und die Wiederholgenauigkeit beim Einspannen des Uhrwerkes entsprechen den Anforderungen und ergeben die notwendige Positioniergenauigkeit. Die roboterunterstützte Demontage wurde durch eine Testphase mit zehn Demontagedurchgängen getestet. Dabei funktionierten 17 von 24 Schritte problemlos, weitere fünf Schritte mit einer Wahrscheinlichkeit von 60% und einer mit einer Wahrscheinlichkeit von 30%. Lediglich ein Schritt musste durch manuelles Ausführen ersetzt werden.
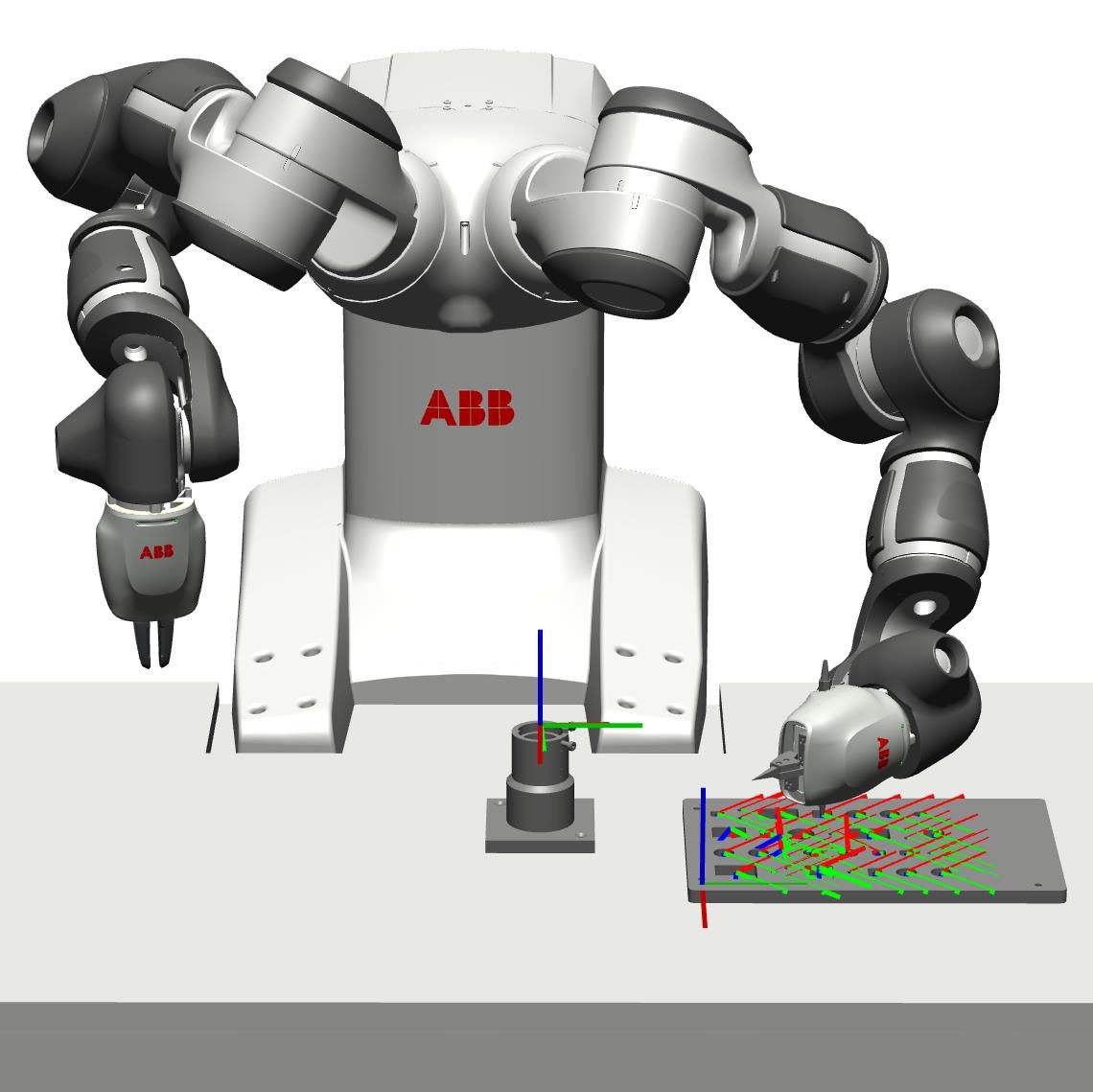
Abb. 3: Aufbau und geteachte Punkte der Station in RobotStudio

Diplomand | Fabian Ifanger |
Auftraggeber | |
Experte | Dipl. Ing. (FH) Ronny Keller |
Examinator |