
Virtual Reality Velosimulator 2.0
Mit Virtual Reality machen wir zukünftige Veloinfrastruktur bereits im Planungsprozess erlebbar.
Das Velo ist in Agglomerationen nicht nur oft das schnellste, sondern auch das energieeffizienteste Verkehrsmittel. Velofahren ist gesund, trägt positiv zur Lebensqualität bei und ist ein unverzichtbares Element eines klimaverträglichen Mobilitätssystems. Die heute in der Schweiz verfügbare Veloinfrastruktur verhindert aber, dass das Potenzial des Velos als Verkehrsmittel für den Alltag ausgeschöpft wird. Es mangelt an durchgehenden Velowegen, die von Jung und Alt als sicher empfunden werden.
Die Zuweisung von Flächen im Strassenraum und die Bereitstellung von Budgets für den Umgestaltungen des Strassenraum werden in politischen Gremien rege debattiert. Grundlage für diese teilweise emotional geführten Debatten sind in der Regel sachliche, zweidimensionale Projektierungspläne. Die Interpretation solcher Pläne fällt nicht immer leicht und nur Fachpersonen gelingt es, sich tatsächlich auch ein Bild von den zukünftigen Raumverhältnissen zu machen.

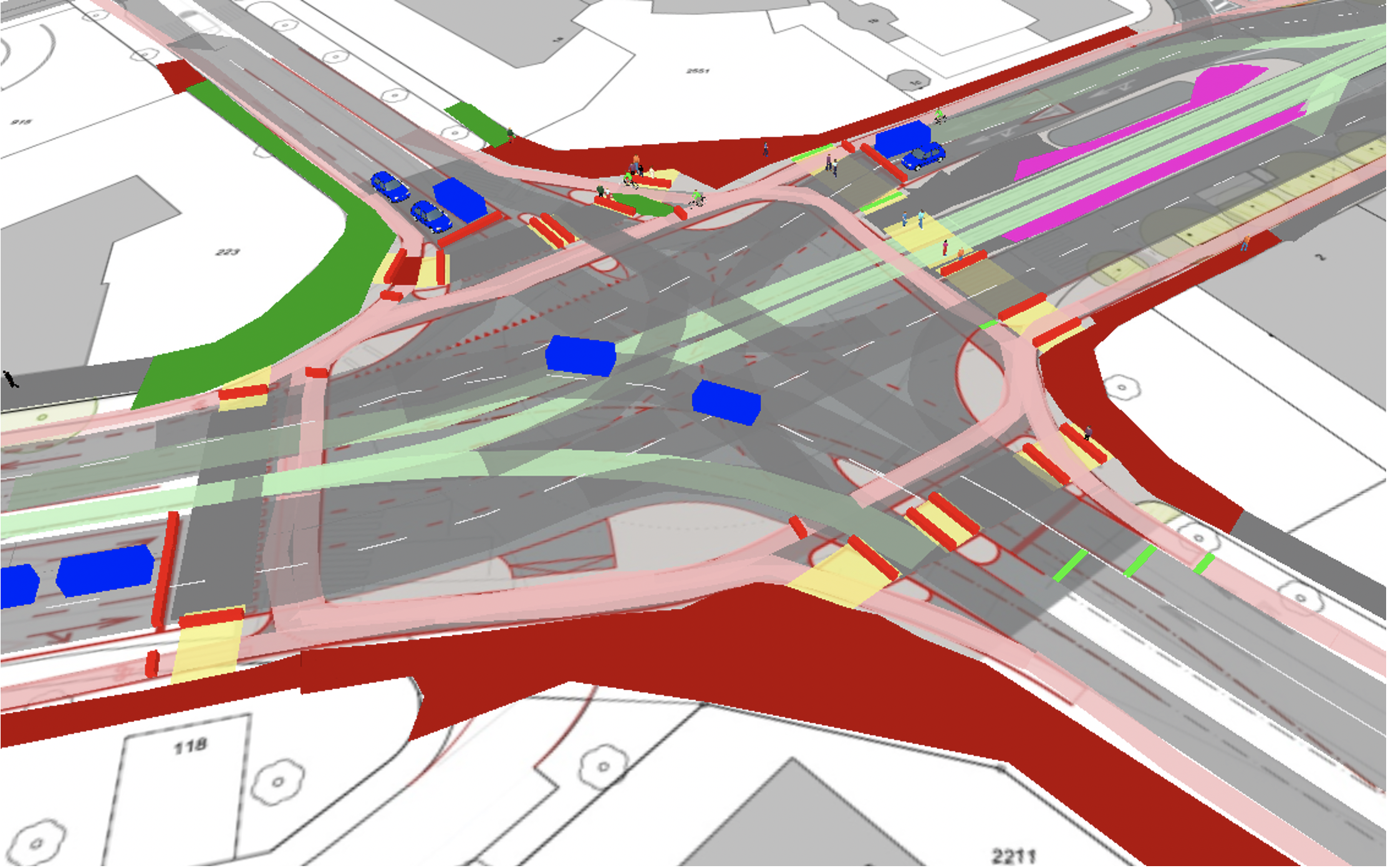
Virtual Reality Screenshot der Kreuzung Bungernziel der Ist-Variante aus der Vogelperspektive.
Anders als konventionelle Renderings bietet Virtual Reality (VR) die Möglichkeit die geplante Zukunft nicht nur zu visualisieren, sondern auch immersiv erleben zu können. Eines der Projektziele ist es, den aufwändigen Prozess zur Generierung realitätsnaher VR-Modelle durch mobile Bildaufnahmen und eine automatische 3D-Rekonstruktion des Strassenraums effizienter zu gestalten. Dieses Projekt zeigt, dass es die Integration eines realitätsnahen 3D-Stadtmodells, einer Verkehrssimulation sowie eines Velotrainers erlaubt, eine realistische VR-Erfahrung mit vernünftigem Aufwand zu realisieren.
Die Generierung von geeigneten 3D-Modellen der heute gebauten Umwelt für den praktischen Einsatz von VR für Anwendungen in der Planung im Allgemeinen und des VR-Velosimulators im Speziellen ist eine Herausforderung. Für VR-Anwendungen werden 3D-Modelle mit verschiedenen Detaillierungsgraden (Levels of Detail LOD) benötigt, deren automatisierte Erfassung und Generierung bisher nicht möglich war.
Zur automatisierten Generierung von passenden 3D-Modellen werden im Projekt zwei Ziele verfolgt. Basierend auf mit einem Messrucksack erfassten Bildern werden einerseits bestehende 3D-Modell automatisiert texturiert. Anderseits wird versucht, aus solchen Bilddaten durch automatische 3D-Rekonstruktion mit neusten Structure-from-Motion (SfM) Ansätzen realitätsgetreue VR-fähige 3D-Modelle zu generieren.
Eine besondere Herausforderung stellt die Kombination der so generierten, visuell realistischen Stadtmodelle mit 3D-Plänen zur zukünftigen Strassenraumgestaltung dar. Das Projekt zielt darauf ab, dafür praktisch umsetzbare Vorgehensweisen zu entwickeln und testen.
Ein weiteres Ziel des Projekts ist es, die Software und Hardware des am Future Cities Laboratory entwickelten VR-Velosimulators auf den aktuellen Stand der Technik zu bringen und modularer zu gestalten.

Zusammenarbeit mit Partnern des Future Cities Laboratory am Singapore ETH Centre.
In einem ersten Schritt wurde nach einer geeigneten Fallstudie gesucht. Die von der Stadt Bern geplante Umgestaltung des Kreisels Burgernziel bietet für das Projekt einen idealen Ausgangspunkt. Im Rahmen der Projektierung wurden bereits 2D-Pläne erstellt und eine Verkehrssimulation aufgesetzt. Zudem ist für die ganze Stadt Bern ein 3D-Stadtmodell verfügbar. Diese Daten wurden von der Stadt Bern dankenswerterweise für das Projekt zur Verfügung gestellt.
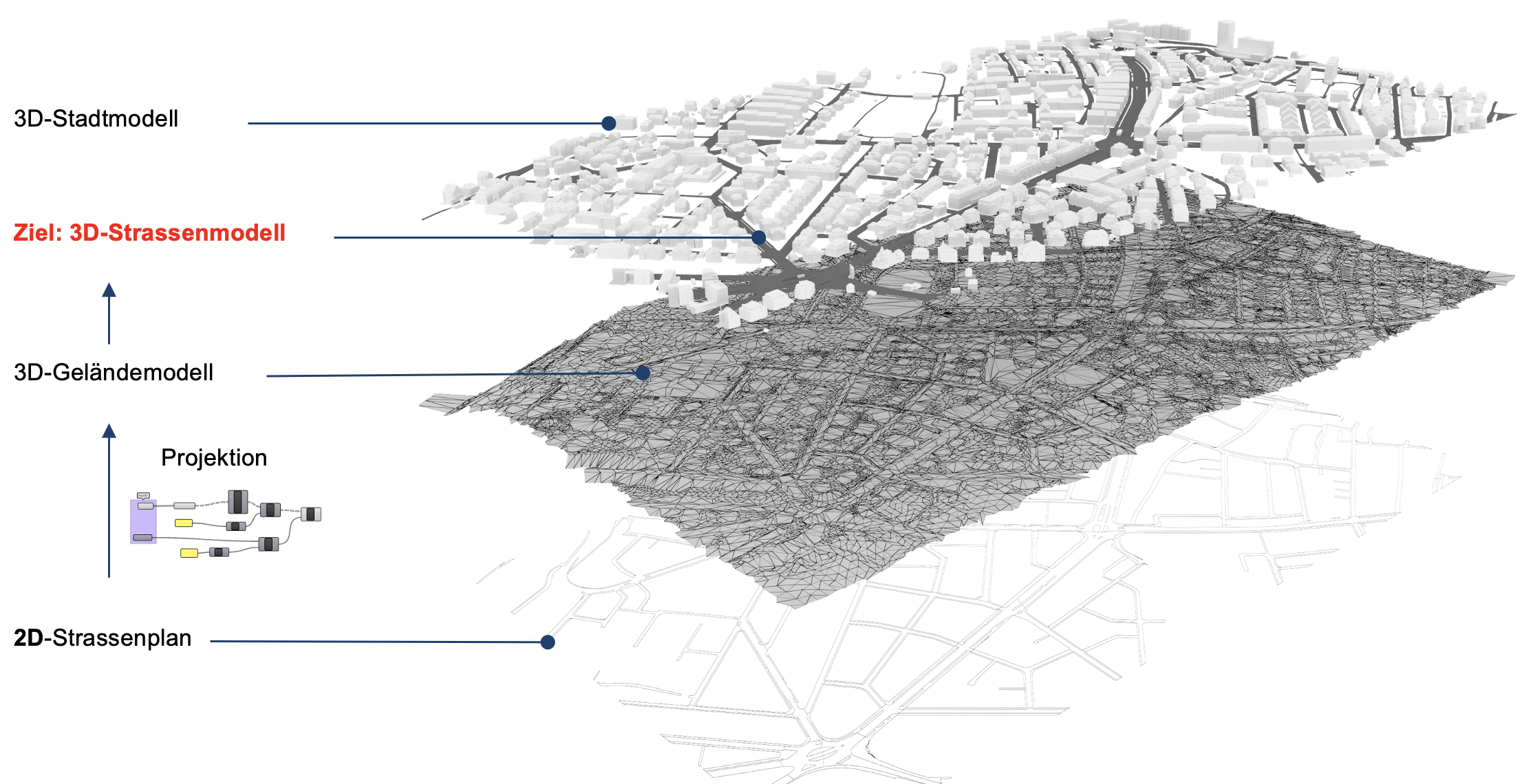
Komposition des 3D-Modells basierend auf 3D-Geländemodell, 3D-Stadtmodell und 2D-Strassenplan.
Die Bilddaten mit Tiefeninformation wurden mit dem IGEO-Messrucksacks aufgenommen, der im Projekt BIMAGE an der FHNW entwickelten wurde. Nach einer exakten Georeferenzierung wurden diese Daten einerseits für die Texturierung des bestehenden Stadtmodells sowie für die automatische Generierung eines realitätsgetreuen 3D-Modells genutzt. Bei der Texturierung wurde sichergestellt, dass für das jeweilige Objekt die am besten geeigneten Bilddaten verwendet werden. So wird der Abdeckeffekt von Bäumen und anderen Objekten zwischen dem Aufnahmegerät und der im 3D-Stadtmodell abgebildeten Umwelt minimiert.
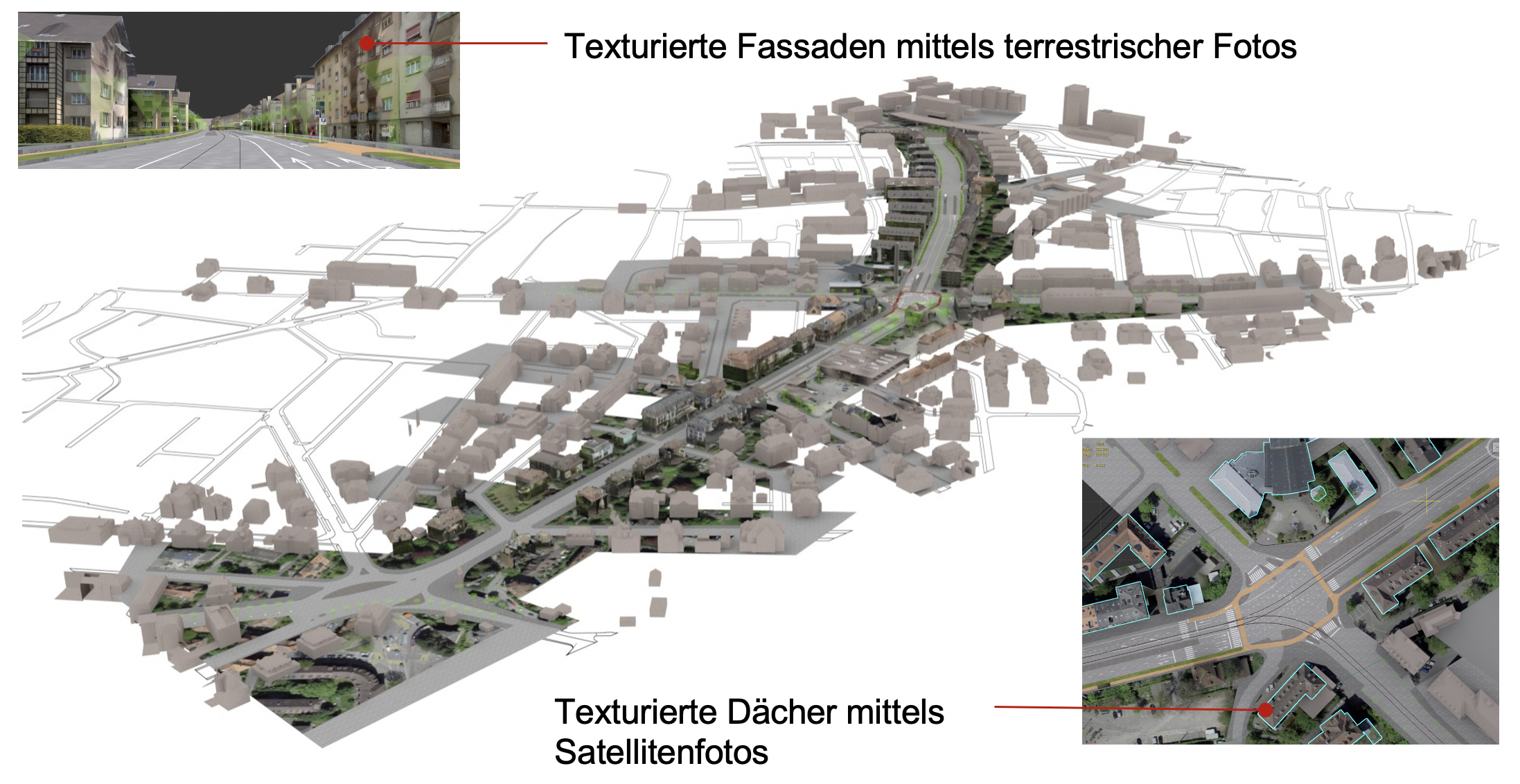
Texturierung der Fassaden mit terrestrischen Fotos und der Dächer mit Satellitenbildern.
Die bestehende Verkehrssimulation wurde in Kombination mit einer Software erstellt, welche den Ablauf der Lichtsignalanlage optimiert. Da die Integration dieser Zusatzsoftware in der Virtual Reality Umgebung zusätzlichen Aufwand bedeutet hätte, wurde zunächst die Verkehrsreglung neu implementiert. Um einen realistischeren Eindruck des Verkehrsgeschehens zu erhalten, umfasst die mit VISSIM erstellte Verkehrssimulation nun auch Fussgänger.
Vissim-Modell der Burgernzielkreuzung in der Variante “Holland”.
Das 3D-Modell des Strassenraums basiert auf den zur Verfügung gestellten 2D-Plänen. Die Kombination verschiedener 2D-Elemente zu Gruppen erlaubte eine effiziente Erstellung verschiedener 3D-Elemente wie etwa Bordsteine oder Erhöhungen von Trottoirs und des Wartebereichs bei den Tramhaltestellen. Weitere 3D-Modelle, welche gemäss der in der Schweiz gebräuchlichen Strassenausstattung erstellt wurden, erhöhen die visuelle Qualität der VR-Umgebung.
Die beiden 3D-Modelle und die mit der Verkehrssimulation generierten Trajektorien der Verkehrsteilnehmenden bilden die Basis für die Generierung der VR-Umgebung mit der Software Unity.

Virtual Reality Screenshot der Kreuzung Bungernziel in der Variante “Holland” aus der Vogelperspektive.
Damit der VR-Simulator einfach genutzt werden kann, entwickelten wir ein einfaches Game Play. Speziell für den Einsatz am Velosimulator entwickelte die Hochschule für Technik passende Sensoren, um die Geschwindigkeit sowie die Ausrichtung der Pedale und des Lenkers kontinuierlich und mit minimaler Verzögerung mit der Game Engine zu synchronisieren.

Anfahrt auf die Kreuzung Bungernziel mit dem 3D-Velosimulator.
Der Velosimulator und die mit der Game Engine erstellten 360-Grad Videos werden nun der Öffentlichkeit an verschiedenen Anlässen vorgestellt. In Zusammenarbeit mit der Stadt Bern wird auch eruiert, wie diese Projektergebnisse einen Mehrwert bei der partizipativen Planung und im politischen Entscheidungsprozess bieten. In weiteren Forschungsprojekten wird versucht, eine direkte Kommunikation zwischen der Verkehrssimulation und der VR-Engine zu ermöglichen und so das Fahrerlebnis zu verbessern.
Finanzierung: | Hochschule für Architektur, Bau und Geomatik |
Projektlaufzeit: | 01.01.2020 – 31.12.2020 |
Projektleiter: | |
Projektmitarbeitende: | Manuela Ammann, Michael van Eggermond, Wissam Wahbeh, Filip Schramka (HTS), Michael Joos (Singapore ETH Centre), Muhammad Salihin Bin Zaol-kefli (Singapore ETH Centre) |
- Future Cities Laboratory, Singapore ETH Centre
- Institut für 4D Technologien, Hochschule für Technik, FHNW
- Tiefbauamt Stadt Bern (Fallstudie Burgernziel)
- Metron (2D-Pläne Strassenraumgestaltung)
- Rudolf Keller AG (Basismodell Verkehrssimulation)
- iNovitas (infra3DCity Daten)